국내 연구진이 웨어러블 로봇 개발 과정에서 사람이 직접 기기를 착용하지 않고도 성능과 사용성을 검증할 수 있는 SW를 개발하는 데 성공했다. 향후 웨어러블 로봇 개발 방식의 패러다임을 변화시킬 것으로 기대됐다.
한국전자통신연구원(ETRI)은 실제 사용자가 착용하지 않고도 웨어러블 로봇 성능과 사용성을 사전에 검증할 수 있는 ‘디지털 휴먼-디바이스 트윈 기반 웨어러블 로봇 통합평가 기술’을 개발했다고 22일 밝혔다.

기존 웨어러블 로봇 개발은 시제품 제작 이후 실제 사용자를 대상으로 반복적인 착용 실험을 수행하기 때문에 시간과 비용 부담이 컸다. 기기를 제작해 사람이 착용하고 시험하는 과정을 수차례 반복했다. 문제가 발생하면 재설계와 추가 실험이 불가피했다.
연구팀은 부산대학교병원 글로컬임상실증센터와 공동 실험을 통해 유효성을 검증했다. 실제 환자들이 웨어러블 로봇을 착용한 상태에서 근력 증강, 재활치료, 기초기능검사 5종 등을 수행한 임상 평가 결과와 디지털 트윈 기반 시뮬레이션 결과를 비교·분석해 신뢰성 있는 평과 결과를 도출했다.
연구팀은 웨어러블 디바이스 성능과 사용자 경험(UX)을 실제 착용 이전인 설계 단계에서 미리 검증할 수 있다는 점이 특징이라고 설명했다.
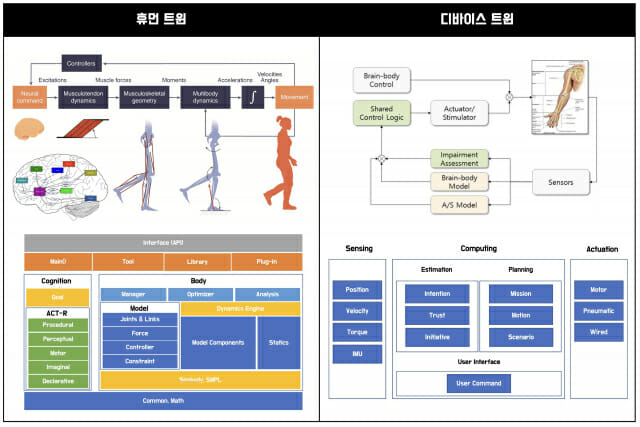
연구팀은 이를 통해 물리 기반 신경·근골격 디지털 휴먼 트윈과 웨어러블 디바이스 트윈을 연동한 웨어러블 로봇 통합 평가 체계를 구축했다. 웨어러블 로봇 설계와 성능을 소프트웨어(SW)적으로 완벽하게 정밀 검증할 수 있게 됐다.
기술도 크게 4건을 확보했다. 신경·근골격 디지털 휴먼 트윈 생성 기술과 물리 기반 디바이스 트윈 생성 기술, 디지털 휴먼-디바이스 연동 시뮬레이션 기술, 웨어러블 로봇 성능·사용성 통합평가 시스템 등이다.
ETRI AI로봇UX연구실 김우진 기술총괄은 "상관계수 0.6 이상의 공인 타당도를 확보했다. 0.6 이상은 실사용자 평가를 직접 수행하지 않고도 그 결과를 상당 부분 예측할 수 있는 방법론이 존재함을 실증했다는 의미가 있다"고 말했다.
윤대섭 AI로봇UX연구실장은 “재활 로봇, 보행 보조기기, 산업용 웨어러블 로봇 등 사용자 경험이 중요한 로봇 UX 분야로 확대 적용해 나갈 계획"이라고 밝혔다.
부산대학교병원 융합의학과 박종환 교수는 “향후 웨어러블 로봇뿐만 아니라 다양한 로봇 개발에 필수적인 소프트웨어 기술로 주목받을 것"이라며 "관련 연구가 더욱 활성화될 것으로 기대된다”고 말했다.
관련기사
- ETRI "AI로봇 '두뇌' 주권 프로젝트 정부에 제안 추진"2025.11.21
- 로봇같은 '근육옷감' 자동직조장비 개발…대량생산 길 열어2025.10.29
- ETRI, 친구처럼 교감하는 '로봇 브레인' 개발 착수2025.09.25
- "입는 로봇이 곧 '피지컬 AI', 의료보험 적용·데이터 확보 관건"2025.09.19

연구팀은 이와 관련한 기술 2건을 웨어러블 로봇 제작업체 및 로봇 전문 제조 기업 등에 이전했다.
연구는 과학기술정보통신부와 정보통신기획평가원(IITP)이 지원하는 ‘정보통신·방송기술 개발사업’ 일환으로 수행됐다.