산지 등에서 자원 채굴 작업을 무인 장비가 실시할 수 있는 시스템이 중국에서 개발됐다.
4일 중국 언론 광밍왕에 따르면 중국 바이두연구원 로봇 및 자율주행실험실(RAL)팀 '무인채굴작업시스템(AES) 개발 성과를 국제 저널 '사이언스 로보틱스'에 게재했다.
이 연구는 감지, 운동 계획, 제어 시스템을 융합해 채굴기가 자체적으로 채굴 및 저장 작업을 할 수 있게 만든 것이다. 24시간 무인 작업이 가능하다. 세계 처음으로 이를 현실화 한 것으로 장시간 작업하는 무인 채굴기 시스템의 자동화, 무인화에 중요한 영향을 줄 것으로 전망됐다.
최근 공정 기계의 발전이 계속되면서 디지털화, 스마트화가 이뤄지는 가운데 자원의 채굴, 산업의 생산, 건설 시공 작업, 인명 구조 작업 등에 다양한 응용이 가능할 것으로도 전망됐다.
그간 채굴 현장에서는 노동력 부족, 채굴기 제어 미숙, 열악한 기상 환경 등 문제로 여러 어려움이 있었다.
이같은 문제 극복을 위해 바이두의 RAL실험실이 메릴랜드대학, 바이두 스마트클라우드사업부와 함께 이번 개발을 진행했다.
이 AES는 3D 환경 감지, 실시간 운동 계획, 장비 제어를 위한 인공지능(AI) 알고리즘을 통해 여러 다른 환경에서도 무인 작업이 가능하다.
관련기사
- 바이두 "향후 3년 간 자율주행차 1천대 생산"2021.06.17
- 中 '베이징 AI 연맹' 창설...바이두 등 19개 기업 참여2021.06.15
- 바이두, 길리와 합작 전기차회사 또 설립2021.06.11
- 中 바이두-길리 "첫 전기차 내년 공개...가격은 3500만원대"2021.06.02
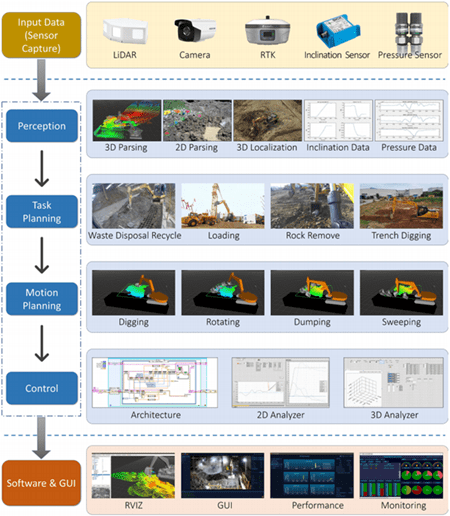
이 시스템은 특히 다중 센서를 융합해 감지 알고리즘을 구현하며, 감지 모듈로 무인 채굴기가 여러 환경 혹은 열악한 환경에서 작업할 수 있게 한다. AES 시스템 작업 효율을 높이면서 응용 범위도 넓힐 수 있게 했다.
우선 환경을 인식한 이후, 작업 계획을 수립하고, 모션 계획을 거쳐 제어를 실시한다. 환경 인식을 할 때는 비전 감지를 이용하며, 마치 사람의 눈으로 보듯 이미지를 인식해 환경을 감지할 수 있다.