[라스베이거스(미국)=신영빈 기자] 자율주행 기술 경쟁이 치열해질수록 사물 인지가 근본적인 과제로 떠오르고 있다. 카메라와 라이다를 결합해 얼마나 정밀하게 주변을 인식하느냐가 기술력을 가르는 기준처럼 여겨져 왔다.
'CES 2026' 현장에서 만난 딥퓨전에이아이는 이 공식이 반드시 정답은 아니라고 말한다. 이들이 내세운 해법은 '레이더' 중심 실시간 AI 인지 시스템이다.
딥퓨전에이아이는 자체 개발한 '실시간 어텐션 기반 필러 아키텍처(RAPA)'로 CES 2026 인공지능(AI) 부문 최고혁신상을 수상했다. 유승훈 대표는 "실제 환경과 실전 적용 경험이 쌓인 결과"라고 평가했다.

현재 자율주행 시장에서 주류로 활용되는 인지 방식은 고가의 라이다를 중심으로 구성된다. 로보택시를 비롯한 고도 자율주행 차량에는 수억 원에 달하는 센서 구성이 적용되는 경우도 적지 않다.
유 대표는 "라이다는 정밀한 3차원 인지가 가능하지만 광학 센서 특성상 비나 안개, 조도 변화에 취약하고 비용 부담도 크다"며 "상용화를 어렵게 만드는 구조적인 한계가 있다"고 지적했다.
딥퓨전에이아이는 이러한 문제를 해결하기 위한 대안으로 4D 이미징 레이더에 주목했다. 레이더는 라이다에 비해 해상도는 낮지만, 전자기파를 활용하는 센서인 만큼 기상 환경에 강하고 장애물 뒤에 가려진 객체의 일부 정보를 획득할 수 있다는 장점이 있다.
다만 레이더 데이터를 활용한 인지 기술은 그동안 연구나 논문 수준에 머물러 있었고, 실제 차량이나 현장에 적용된 사례는 거의 없었다.
회사는 공개 데이터셋이 아닌 실차에서 직접 수집한 대규모 실환경 데이터를 기반으로 레이더 포인트클라우드 딥러닝 모델을 개발했다. 10만 프레임 이상 데이터를 학습해 약 360도 범위를 실시간 인지할 수 있는 레이더 기반 AI 모델을 구현했다.
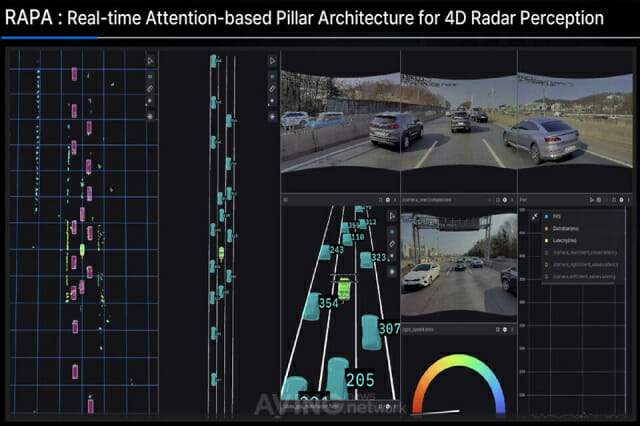
RAPA는 다수 4D 이미징 레이더 데이터를 실시간으로 융합·분석하는 소프트웨어 정의 인지 시스템이다. 어텐션 기반 딥러닝 구조를 적용해 신호 간 상관관계를 스스로 학습하고 추론하며 이를 통해 객체 탐지와 추적 정확도를 끌어올렸다.
이 기술이 가장 먼저 적용된 분야는 자율주행차가 아닌 방산이다. 최근 방위산업 분야에서는 무인기와 무인수상정(USV) 등 무인 플랫폼이 핵심 화두로 떠오르고 있다.
딥퓨전에이아이는 국내 방산 업체와의 프로젝트에서 인지 파트를 담당하며 무인수상정 등 실제 플랫폼에 기술을 적용하고 있다. 현재 해당 프로젝트는 실전 배치를 염두에 두고 개발과 납품이 동시에 진행 중이다. 내년까지 공급이 이어질 예정이다.
사업 성과도 점차 가시화되고 있다. 딥퓨전에이아이는 방산 분야에서 2023년 약 1억원, 2024년 약 8억원의 매출을 기록했고, 작년에는 누적 13억원 이상을 달성했다. 무인수상정 기준으로는 선박 한 척당 약 1억원 수준 매출이 발생한다.
관련기사
- 공기만으로 수면 모니터링…텐마인즈, CES서 'AI 슬립봇' 공개2026.01.08
- 원익로보틱스, CES 2026서 신형 로봇핸드 공개2026.01.08
- 류재철 LG전자 대표 "로봇은 혼자 못해...협력 속 상용화 앞당길 것"2026.01.08
- 로봇관절 전쟁…LG전자·HL만도 출사표2026.01.07
딥퓨전에이아이는 RAPA의 데모 시연과 함께 레이더-카메라, 레이더-라이다를 결합한 후속 센서퓨전 솔루션도 소개했다. 다만 회사가 강조하는 핵심은 여전히 레이더 중심의 인지 구조다.
유 대표는 "CES 최고혁신상 수상은 기술 가능성을 인정받은 출발점"이라며 "자율주행과 스마트 모빌리티, 방산 등 신뢰성이 무엇보다 중요한 영역에서 레이더 기반 AI 인지가 하나의 현실적인 대안이 될 수 있음을 증명해 나가겠다"고 말했다.