카이스트(한국과학기술원) 연구팀이 개발한 자율보행 로봇이 국제 경진대회에서 매사추세츠 공과대(MIT)를 큰 점수 차이로 꺾고 우승했다.
명현 전기및전자공학부 교수가 이끄는 ‘드림스텝(DreamSTEP)’ 팀은 지난 1일(현지시간) 국제 로봇·자동화 학술대회(ICRA)에서 주최한 ‘사족로봇 자율보행 경진대회(QRC)’에서 이같은 성과를 냈다. 드림스텝 팀은 결승전에서 총점 246점을 획득해, 60점을 받은 MIT에 대승했다.
지디넷코리아는 명현 교수와 서면 인터뷰를 통해 이번 대회 우승 의미와 국내 로봇 산업 현주소를 짚어봤다.
명 교수가 이끄는 미래도시로봇 연구실은 2008년 설립되어 로봇 자율주행 핵심 기술을 바탕으로 미래 도시에서 사용할 수 있는 각종 로봇 기술을 개발하고 있다. 그 가운데 이번 QRC에 출전한 드림스텝 팀은 석박사 과정 학생 8명으로 구성됐다.
■ “학습형 자율보행, 우승 원동력”
명 교수는 “보행로봇이 학습을 통해 빠르게 자율적으로 보행할 수 있다는 것을 보여줬다”며 “독자 개발한 요소 기술들을 통합하고 최적화해 자율보행 기술을 선보였고, 대회 우승으로 기술 우수성을 인정받아 감회가 깊다”고 수상 소감을 밝혔다.
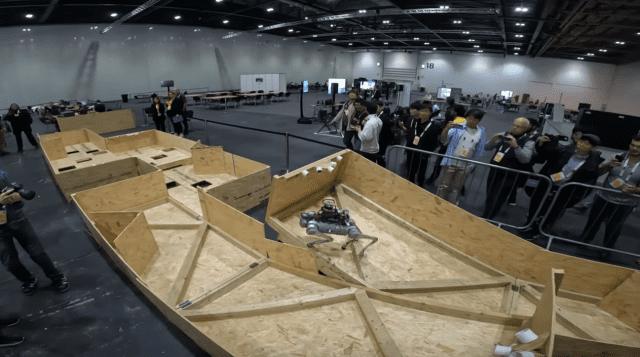
이번 대회에서 우승을 안겨준 결정적인 전략은 ‘빠르게 자율보행하는 것’이었다고 명 교수는 설명했다. 경기장은 전체 다섯 개 구간으로 이뤄졌다. 비탈진 널빤지들이 얽혀 있거나 스폰지가 깔려 있고, 롤러가 있는 계단과 K자 형태 장애물 등이 산재했다. 구간을 하나 지날 때마다 수동 조작은 1점, 자율보행은 4점을 받는다. 준결승부터는 이 구간들에 15도 경사가 더해지며 점수도 2배씩 늘어난다. 결승전은 삼각형·박스형 장애물을 더 설치했다.
드림스텝 팀은 이런 평가 기준에 주목했다. 장애물을 빠르게 많이 통과하되, 가급적 자율보행을 활용하자는 전략을 세웠다. 명 교수는 주요 경쟁 팀으로 MIT이 아닌 이탈리아 ITT 팀을 지목했다.
명 교수는 “MIT는 주로 수동 조작 기술을 준비했기 때문에 강력한 우승 후보로 생각하지 않았고, 대신 사족보행을 10년 넘게 연구한 이탈리아 IIT 팀을 가장 강력한 경쟁 상대로 예상했다”며 “그런데 이탈리아 팀이 한 발짝씩 천천히 움직이는 고전적인 자율보행을 준비해오면서, 오히려 MIT보다 점수가 뒤쳐졌다”라고 전했다.
■ “자체 개발 ‘드림워크’ 기술…시·촉각 센서 없이 보행”
드림스텝 팀이 대회에 활용한 로봇은 보행로봇 제어기 '드림워크(DreamWaQ)' 기술을 탑재했다. 이 핵심기술은 로봇이 라이다나 비전 등 시각·촉각 센서 도움 없이도 블라인드로 보행이 가능하게 돕는다. 로봇 내부 관성 센서와 관절 센서 정보만으로 계단을 오르고 험지를 보행할 수 있는 것이 특징이다. 명현 교수팀이 세계 최초로 개발했다.
드림워크는 ‘심층 강화학습’이라는 기술로 구현했다. 이 시스템은 두 개의 제어기 신경망으로 구성했다. ‘상황 추정 네트워크’가 주변 환경을 해석하면 ‘정책 네트워크’가 추정된 상황을 바탕으로 실제 로봇을 제어하도록 출력한다. 모든 학습은 시뮬레이션에서 수행한다. 개인 PC에서 1시간 정도만 학습해도, 곧바로 로봇에 적용 가능하다고 명 교수는 설명했다.
로봇은 이외에도 자율보행을 위해서 주변 환경 지도를 만들고, 그곳에서 스스로 위치를 인식하는 ‘위치 측정 및 동시 지도화(SLAM)’ 기술을 탑재했다. 지도에서 위험도를 파악하고 안전한 경로를 계획할 수 있는 기술, 갑자기 장애물을 만나도 회피하며 보행할 수 있는 기술 등을 적용했다.

■ “사족보행 기술 핵심은 모듈 통합”
보행로봇은 바퀴로 움직이는 로봇에 비해 아직 해결할 과제가 많은 분야다.
명 교수는 “제어기뿐만 아니라 매핑, 위치인식, 경로계획 등 기능이 모두 잘 이뤄져야 한다”며 “모든 모듈을 성공적으로 통합해 자율보행하는 기술은 아직까지 세계적으로 개발 중인 단계다”라고 밝혔다.
이어 “발이 걸리면 각 관절의 경로계획을 다시 해야 하는데 그 부분이 쉽지 않았다”며 “제어도 어렵지만 특히 경로계획 기능에 진전이 필요할 것으로 보인다”고 설명했다.

다만 개발이 진전되면 응용 가능성도 높은 분야다. 바퀴만으로 이동하기 어려운 여러 험지에서 사람을 대신해 위험한 일을 대신할 수 있다.
명 교수는 “보행로봇 기술이 고도화되면 현장 감독이나 정찰, 감시 등 업무를 수행할 수 있다”며 “재난 상황에서도 사람을 대신해 여러 작업에 투입할 수 있다”라고 전했다.
이어 “변전소나 원자력 발전소 같은 곳에서도 관심을 갖고 활용성을 탐색하고 있다”며 “일상에서도 노약자 산책을 돕거나 간호를 보조하고, 택배를 나르고, 심부름을 하는 등 많은 서비스가 가능할 것”이라고 덧붙였다.
명 교수는 사족보행이 이족보행 로봇에 비해 상용화가 빠르게 진행될 것으로 전망했다. 이족보행 로봇은 여전히 보행 안정성을 해결하기 쉽지 않아서 상용화에 어려움을 겪고 있지만, 사족보행 로봇은 문제를 상당 부분 개선하고 있다고 분석했다.
■ “국내 로봇 핵심기술 앞서 있어…비좁은 실험 환경 개선해야”
명 교수는 “국내 로봇 밀도가 세계 1위인만큼, 기술 수준도 상당 부분 앞서 있다”며 “IT 인프라를 잘 활용하고, AI, 알고리즘, SW 등 우리 기업들 강점을 잘 활용하면 전 세계를 선도할 수 있을 것”이라고 내다봤다.

명 교수는 실험 환경에 대해서는 아쉬움을 내비쳤다.
명 교수는 “외국 기관들을 보면 학교 산하에 ‘로봇 연구소(Robotics Institute)’를 설립해 실험 환경을 개선하고 로봇 연구를 가속화하는 경향이 있다”며 “우리나라도 로봇 특성상 실험 공간이나 기자재를 키워 규모의 경제를 실현할 필요가 있다”라고 전했다.
관련기사
- "아이 엠 그루트"...디즈니, 춤추는 가오갤 '그루트' 로봇 공개2023.06.11
- "아이스크림, 로봇이 만들면 좋은 점은"2023.06.06
- '종횡무진' 배달로봇…수도권 아파트 단지 활보2023.06.02
- 딥마인드, 실제 동물처럼 빠르게 움직이는 로봇 공개2023.05.31
명 교수에 따르면 미국 카네기멜론 대학, 미시건 대학, 영국 옥스퍼드 대학 등이 로봇연구소를 운영 중이다.
명 교수는 이번 대회 이후에도 ‘공공에 유익을 줄 수 있는 로봇’을 개발하기 위해 연구에 몰두할 계획이다. 자기만족을 넘어 경제적·사회적 파급력을 줄 수 있는 실용적인 로봇을 선보이겠다는 목적이 국제대회 수상 의미를 더욱 빛낸다.
명현 카이스트 교수 프로필
- 1970년, 출생
- 1988~1992년, 카이스트 전자전산학부 수석 졸업
- 1992~1994년, 카이스트 전기및전자공학과 석사
- 1994~1998년, 카이스트 전기및전자공학과 박사
- 1998~2002년, 한국전자통신연구원 가상현실연구부 선임연구원
- 2002~2003년, 이머시스 기술이사 및 연구소장
- 2003~2008년, 삼성종합기술원 수석연구원 (삼성청소로봇개발)
- 2008~2012년, 카이스트 건설및환경공학과 조교수, 로봇공학학제 겸임교수
- 2019년~현재, 카이스트 전기및전자공학부 교수
- 2021년~현재, 군집형무인CPS특화연구실 센터장