"자동화 이면에는 경제성과 생산성이 있습니다. 아무리 좋은 자동화라도 돈이 너무 많이 들거나 사람이 더 생산적이면 실효성이 없죠."
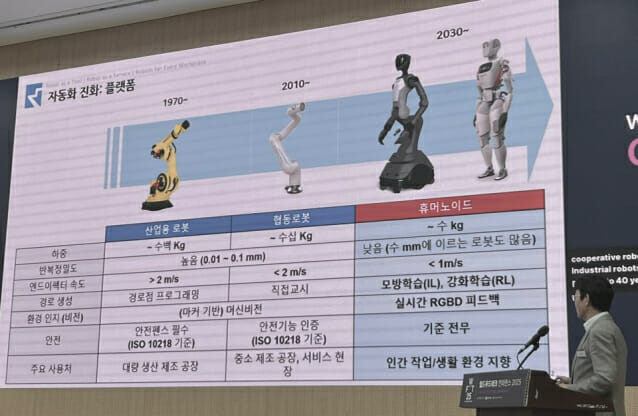
박종훈 뉴로메카 대표가 13일 서울 한국과학기술회관에서 열린 '월드푸드테크 2025 컨퍼런스'에서 푸드테크 자동화의 현실과 과제를 짚고, 피지컬 AI와 휴머노이드를 결합한 조리 자동화 구상을 공개했다.
박 대표는 현실적인 접근으로 '반자동화'를 제시했다. "사람이 하고 있는 작업들 중에서 일부를 최소한만 수정해 로봇이 사람이 하기 힘든 부분을 대신"하는 방식이다.
대표 사례로 치킨 튀김 공정을 들며 "로봇 한 대가 한 시간에 12마리 정도를 튀겨주는데 가격은 약 4천만 원 중반대"라며 "충분히 생산성이 남고 경제성이 인정된 분야"라고 말했다.

로봇 바리스타는 생산성이 가장 큰 걸림돌로 지목됐다. 박 대표는 "바리스타는 40~45초 정도 걸리는데 로봇으로는 1분 15초~1분 30초가 걸린다"라며 "그러면 1시간에 40잔밖에 못 판다"고 설명했다.
이에 공장자동화 노하우를 적용해 컨베이어·PLC 기반 완전 자동화 커피 시스템을 만들었지만 너무 비싸 경제성에 한계가 있다고 평가했다. 그는 "우리가 경제성을 잡느냐, 생산성을 잡느냐가 굉장히 중요하다"고 강조했다.
라면 조리 자동화 사례를 통해 시스템 통합(SI) 비용이 구조적 문제임을 지적했다. "라면 공정을 자동화하려면 수많은 일이 필요하다"며 "라면 로봇을 만들려면 로봇이 차지하는 건 한 20%, 나머지 한 60%는 주변 장치, 20%는 운영"이라고 전했다.
박 대표는 휴머노이드가 SI 문제를 줄일 대안이 될 수 있다고 봤다. "휴머노이드는 이미 팔에 손이 붙어 있고 이동을 위한 자유구동 로봇이나 다리가 있다"면서도, 현실적 제약을 짚었다.
그는 "현재 휴머노이드를 하려면 크게 세 가지 인프라가 필요하다"면서 "뉴로메카는 로봇 플랫폼과 데이터 팩토리, 데이터 인프라 세 가지를 다 가지고 있다"고 밝혔다.
뉴로메카는 사람의 도구를 그대로 쓰는 전제로 데이터를 수집하는 '데이터 팩토리'를 표준화해 대학 등 3~4곳에서 라면 조리 데이터를 추출 중이다.
박 대표는 라면 조리에 필요한 핵심 5대 기술을 다음과 같이 꼽았다. 먼저 ▲물 받기부터 ▲봉지·스프를 뜯는 일 ▲집게를 핸들링하는 일 ▲계란을 깨서 넣는 일 ▲떡을 잘 분배하고 파를 얹는 등 플레이팅 작업까지 언급했다.
그는 "이 다섯 가지 기술을 핵심으로 보고 라면 끓이는 영역의 파운데이션 모델, 즉 버티컬 RFM을 만들어야 한다"고 했다. LLM과 비교해 "로봇은 VLA를 바탕으로 행동까지 만들어내야 한다"고 설명했다.
학습 방법으로는 모방학습 중심 접근을 소개했다. "원격 디바이스 정도만 있으면 동작을 잘 모사할 수 있다"며 "한 20가지 동작 정도 데이터를 줘서 학습하면 임의 상황에 대응할 수 있다"고 했다.
안전성은 4단 제어 레이어로 담보한다. 그는 "척수 반사 신경 같은 레이어를 두고 서로 간 양팔 충돌이나 몸통과 충돌하지 않는다"며 "시스템 레이어 외에도 로보틱스, 그 밑 절대적 안전까지 네 가지 레이어로 파운데이션 모델을 만든다"고 설명했다.
관련기사
- 뉴로메카, 풀스택 로봇 파운데이션 모델 공개2025.10.02
- 허영진 뉴로메카 CTO "안전·정밀 강화 휴머노이드 4종 공개"2025.10.02
- 뉴로메카, 핵심 부품 국산화 협동로봇 공급 개시2025.10.01
- 뉴로메카, 휴머노이드 플랫폼 2종 공개2025.09.30
구체 사례로 그는 "비정형 납땜을 학습해 1시간 동안 하면 99% 성공률로 납땜을 한다. 사람이 다가가면 회피하면서 납땜을 한다"고 소개했다. 또 밀가루·참깨·소금과 같은 물질을 대부분 1g 이내로 정확하게 계량하는 학습 결과도 제시했다.
박 대표는 "라면 끓이는 건 내년쯤 성과를 보여드릴 수 있으리라 생각한다"면서 "휴머노이드가 사람이 쓰는 주방 공간에 그대로 들어가 주방 도구들을 가지고 요리하는 것이 궁극적 목표"라고 밝혔다.