영화 '닥터 스트레인지'에는 망토가 스스로 접고, 날아 다니는 장면이 나온다. 마치 마법 망토처럼.
국내 연구진이 이와 유사한 '로봇 종이(시트)' 원천기술을 개발했다. 이 시트는 여러 형태로 실시간 접힘이 가능하다. 향후에는 더 다양한 형태의 자유로운 연출도 기대된다.
KAIST(총장 이광형)는 기계공학과 김정 교수와 박인규 교수 공동 연구팀이 형상을 실시간 프로그래밍할 수 있는 '로봇시트' 원천 기술(field-programmable robotic folding sheet)을 개발했다고 6일 밝혔다.
연구팀은 사용자 명령에 따라 다양한 3차원 형상을 만들어 낼 수 있는 소재 기술 및 프로그래밍 방법론을 통합적으로 제시했다.
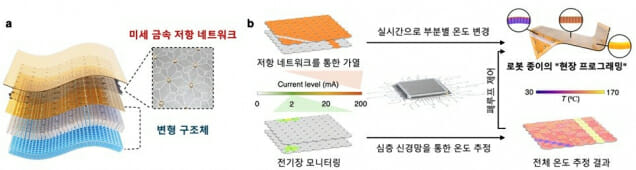
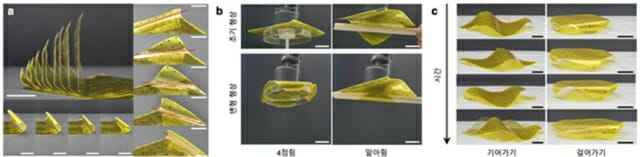
‘로봇 시트’는 얇고 유연한 고분자 기판 내에 미세 금속 저항 네트워크를 내장시켜 각 금속 저항이 히터이자 온도 센서 역할을 수행한다. 온도에 따라 별도 외부 장치 없이도 시트의 접힘 상태를 실시간 감지하고 제어한다.
또 유전 알고리즘(genetic algorithm) 및 심층 신경망(deep neural network)을 결합한 SW는 스스로 소재를 반복 가열 및 냉각을 통해 사용자가 원하는 접힘 위치와 방향, 강도를 조절하며 정확한 형상을 만들어낸다.
김정 기계공학과 교수는 "전자 종이처럼 생긴 로봇 시트가, 필요한 순간에 원하는 위치가 접히도록 프로그래밍할 수 있다"며 "2차원 평면 시트 형태의 로봇을 다양한 3차원 형상으로 변형시킬 수 있다"고 말했다.
연구팀이 만든 저항체 네트워크는 저항체 갯수(308 개)보다 적은 다수의 전극(8 x 8 배열)을 통해 제어한다. 또 –87°~+109°의 높은 접힘 굴곡도도 달성했다.
김정 교수는 "자기 몸을 바꾸면서 똑똑하게 움직이는 형상 지능 구현에 한 걸음 더 다가간 원천기술"이라며 "향후 고속 냉각, 다양한 크기 및 형상으로의 확장, 일체형 전극 구조 설계 등에 응용 사능한 차세대 피지컬 AI 플랫폼으로 개발해 나갈 계획"이라고 덧붙였다.
KAIST 박현규 박사(현 삼성전자 삼성종합기술원)와 정용록 교수(현 경북대학교)가 공동 제1저자다.
관련기사
- "피지컬AI는 첫걸음, 데이터 확보부터 힘 모아야"2025.07.30
- 경북대 달성캠퍼스에 무선전력전송 테스트베드 착공2025.06.25
- [영상] 사람처럼 일하는 로봇…100Hz 동작 제어2025.06.23
- 삼성·KAIST, 초거대 AI모델 학습 최적화 시뮬레이션 개발…"GPU 사용률 10% 개선"2025.03.13
연구 결과는 국제 학술지 ‘네이처 커뮤니케이션즈' 온라인판(8월)에 실렸다.
한편 이 연구는 한국연구재단(과학기술정보통신부) 지원을 받아 수행됐다.