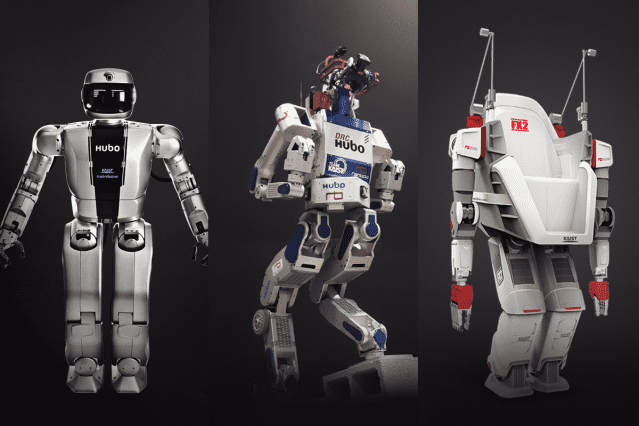
레인보우로보틱스가 지난해 휴머노이드(인간형) 로봇에 연구·개발 역량을 집중한 것으로 드러났다. 새로 시작된 정부 과제 3건이 모두 휴머노이드와 관련된 내용이었다.
21일 사업보고서에 따르면 레인보우로보틱스는 지난해 연구개발비로 55억원을 썼다. 전년 대비 약 18% 늘었다. 이 가운데 정부 보조금은 30억9천만원을 받았다.
주요 내부 과제로는 ▲경비용 사족로봇 사업화 ▲인간형 이족보행 로봇 플랫폼 고도화 기술 개발 ▲동시적 위치추적 및 지도작성(SLAM)·내비게이션 기술 개발 ▲헙동로봇 핵심 부품 및 응용시스템 개발 등이 진행됐다.
경비용 사족로봇 사업화는 사족보행로봇 RBQ 시리즈를 활용해 보안 구역에서 24시간 순찰 및 경계를 제공할 계획이다. 팬·틸트·줌(PTZ) 카메라 모듈을 장착하고 원격통신을 통한 화면 송출, 음성 대화, 관제 등을 가능하도록 시스템을 갖추고 사업화를 진행하고 있다.
레인보우로보틱스는 2028년을 이족보행 플랫폼의 양산화와 일반인들에게 활용할 수 있는 목표 시점으로 설정했다. 미시적인 관점에서의 개발 계획보다는 거시적 관점에서의 계획으로 연구개발에 매진하고 있다고 회사 측은 설명했다.
지난해 시작된 정부과제 3개는 모두 휴머노이드 로봇과 관련된 것이었다. ▲산업환경을 위한 능숙 조작 민첩 보행 휴머노이드 로봇 개발 ▲작업교시·지능 연계를 위한 40종 이상 다종부품 조작 구현이 가능한 모바일 매니퓰레이션 시스템 개발 ▲주력 제조업종의 자율제조를 위한 휴머노이드 로봇 기반 자율공정 운영 기술 개발에 나섰다.
산업환경을 위한 능숙 조작 민첩 보행 휴머노이드 로봇 개발 과제는 주관기관인 한국과학기술원(KAIST), 공동연구개발기관인 메사추세츠공과대학(MIT)와 함께 진행하고 있다. 고속 민첩한 이동이 가능하면서도 우수한 장애물 극복 성능을 가지며, 양팔을 이용하여 다양한 물체의 파지 및 자율적 조작이 가능한 휴머노이드 로봇 개발을 목표 한다.
이 연구를 통해 개발될 플랫폼은 민첩 보행과 능숙 조작이 가능한 기술력을 기반으로, 기존 고정형 로봇이나 모바일 플랫폼이 수행하기 어려웠던 산업 현장에서의 활용을 기대하고 있다. 장애물 극복과 이동, 사다리 등반, 양팔 및 전신 제어를 통한 물체 파지, 조작이 가능할 전망이다.
이를 통해 산업에서 필수적인 제조 및 생산 공정과 물류 운송업, 더 나아가 서비스, 치안, 구조 업무 등에 이용될 것으로 회사 측은 기대하고 있다.
작업교시·지능 연계를 위한 40종 이상 다종부품 조작 구현이 가능한 모바일 매니퓰레이션 시스템 개발 과제는 레인보우로보틱스가 주관연구개발기관로 나섰고, 한국기계연구원과 아주대학교, 한국과학기술원(KAIST)이 공동연구개발기관으로 함께 참여하고 있다.
관련기사
- 삼성전자, 작년 레인보우서 로봇 14.5억원 샀다2025.03.22
- 레인보우로보틱스, 삼성전자 출신 김용완 CFO 사내이사 선임2025.03.20
- 삼성 휴머노이드 청사진은 '자율공정 AI' 로봇2025.03.17
- 주총 앞둔 삼성전자, 근원적 경쟁력 답 내놓을까2025.03.13
이 과제에서는 다양한 형태와 크기·무게, 강도를 가지는 40종 물체 파지·조작 구현과 고난도 다종부품 조작이 가능한 양팔 모바일 매니퓰레이션 시스템을 개발한다. 이를 통해 작업교시와 작업지능 시스템 연계가 가능한 통합 제어 플랫폼 개발을 최종 목표로 뒀다.
레인보우로보틱스 측은 "현재 이족 보행 로봇 기술 분야에서 최고 수준의 기술을 보유하고 있는 곳은 미국의 B사와 일본의 H사가 있다"며 "당사 기술력은 세계 3위 수준으로 판단하고 있다"고 설명했다.