로봇에 인공지능(AI)을 어떻게 사용해야 할까. 많은 공학자들이 행동형 AI를 주제로 연구를 이어오는 상황 속에서 데니스 홍 교수는 "AI가 무조건 능사는 아니다"라고 역설했다.
데니스 홍 캘리포니아대학교 로스앤젤레스(UCLA) 기계항공공학과 교수는 23일 대구 엑스포에서 열린 '2024 미래혁신기술박람회(FIX 2024)'의 부대 행사로 개최된 '로봇비즈니스포럼'에서 이같이 밝혔다.
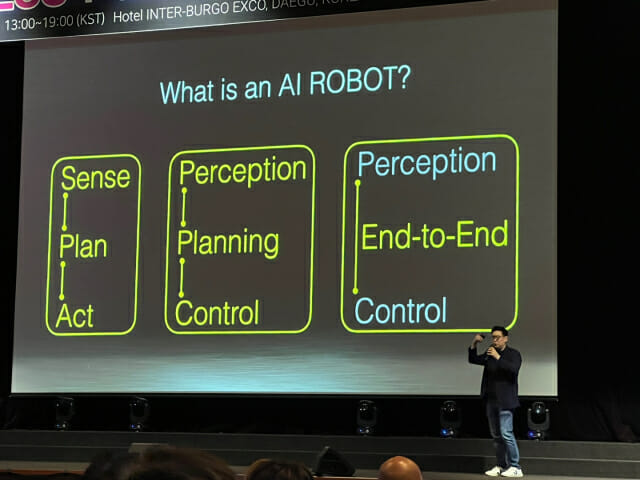
홍 교수는 강연에서 "AI 로봇에 대한 정의부터 다시 생각해볼 필요가 있다"고 말했다. 이전까지 '감각-계획-행동' 3단계로 규정됐던 로봇의 개념이 AI를 만나면서 '인식-학습-조작' 방식으로 진화하고 있다는 설명이다.
그는 "로봇의 학습은 기존 생성형 AI가 배우는 방식과는 다르다"고 덧붙였다. 챗GPT는 수많은 텍스트를, 달리(DALL-E)는 이미지 데이터를 학습했지만, 로봇은 실제 세계에서의 물리값을 다뤄야 하는 과제를 직면했다. 가령 속도와 가속도, 압력과 마찰 등 수많은 데이터가 필요한데, 이를 온라인 상에서 얻기 어렵다는 것이다.
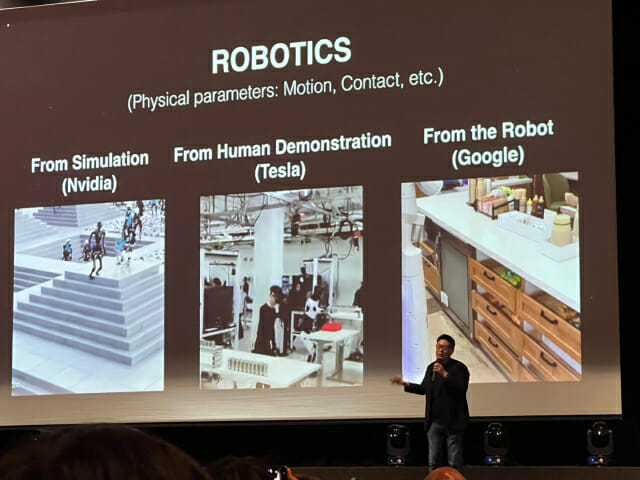
데니스 홍 교수는 이런 데이터 습득을 위한 최근 연구 동향을 소개했다. ▲먼저 엔비디아는 시뮬레이션을 통해 로봇을 훈련시킨다. ▲테슬라는 사람이 직접 로봇을 조종하면서 데이터를 습득하는 방식을 취한다. ▲마지막으로 구글은 로봇 혼자서 작동하며 학습하도록 한다.
그는 "실제 휴머노이드 로봇의 조건에서는 시뮬레이션이 현실 세계와 괴리가 크기 때문에 실질적인 데이터를 얻기 어렵다. 테슬라의 방식도 데이터 습득량에 한계가 있다"며 "이족보행 로봇을 혼자 학습시키다가 넘어지면 고장나는 문제도 생각해야 한다"고 지적했다.
결과적으로 "휴머노이드(인간형) 로봇에 AI를 적용하는 일에는 여전히 넘어야 할 산이 많다"며 "학습을 통한 조작이 쉽지 않은 경우에는 수학적 계산을 적절히 이용하는 게 해답이 될 수 있다"는 것이 그의 주장이다.
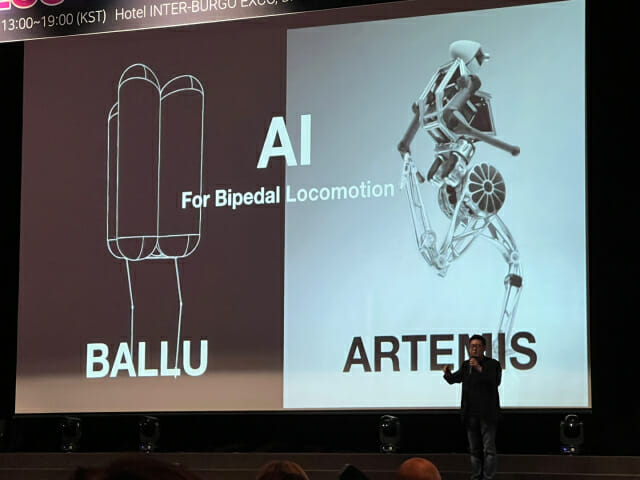
데니스 홍 교수는 로멜라연구소에서 개발한 두 개의 이족보행 로봇을 소개했다. 익히 알려진 휴머노이드와 유사한 형태의 '아르테미스'와 헬륨풍선에 매달려 절대 넘어지지 않는 로봇 '발루'는 개발 과정부터 전혀 다른 접근 방식이 필요했다.
관련기사
- 데니스홍 휴머노이드 로봇 '아르테미스' 국내 첫 상륙2024.10.23
- "노숙자 위한 음식배달 로봇"…데니스홍, 아들 이산 군 프로젝트 소개2024.06.22
- HD현대로보틱스, 50kg급 협동로봇 개발중…내년 공개2024.10.23
- LG가 투자한 베어로보틱스, 첫 자율물류로봇 공개2024.10.23
그는 "아르테미스는 AI 적용이 어려워서 기존 수학적 계산으로 보행을 구현해냈다"며 "반면 발루는 작은 바람에도 움직임 분석이 어려워져 AI에 맡기는 편이 낫다. 절대 넘어지지 않는 특성 덕분에 24시간 연구소를 걸어다니며 데이터를 축적하기에도 용이하다"고 말했다.
홍 교수는 "사람이 망치를 가지고 있으면 모든 게 못으로 보이는 것처럼, AI 연구가 활발해지면서 모든 문제를 AI만으로 해결하려는 경향이 생겼다. 이는 굉장히 위험한 자세"라며 "경우에 따라 문제의 본질을 이해하고 그에 맞는 접근법을 고민해야 한다"고 강조했다.