맥스트(대표 박재완)는 카메라와 관성측정센서(IMU)를 결합한 '센서 퓨전 슬램' 기술을 공개했다고 27일 밝혔다.
자율주행 핵심 기술로 알려진 SLAM은 보통 라이더 센서와 카메라를 결합해 현실과 동일한 정밀 지도를 생성하는 자율주행차 위치 추정 기술이다. 이 방식은 고가의 라이더 센서가 필요하고, 정밀 지도를 주기적으로 업데이트하는 데 시간과 비용이 많이 발생해 대기업 위주로 기술개발이 이뤄져왔다.
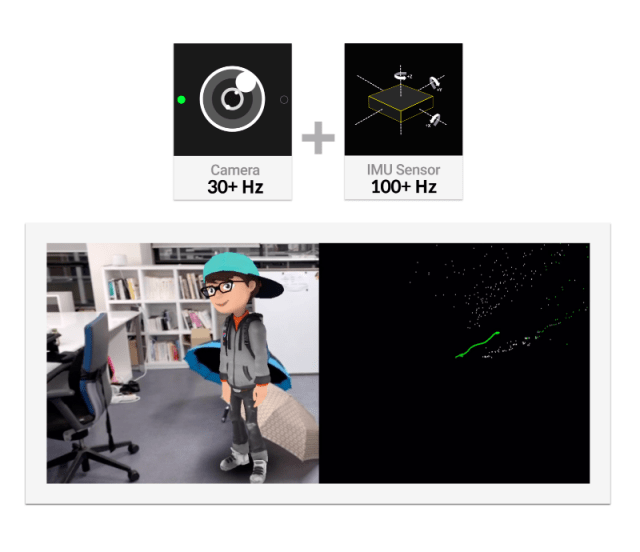
'센서 퓨전 슬램' 기술은 라이더 센서를 사용하지 않고 대부분의 스마트폰에 장착된 관성측정센서(IMU)를 카메라와 결합해 SLAM과 동일 효과를 낸다. 스마트안경-무인로봇-드론 등과 같이 사람과 비슷한 속도에서 SLAM 기술을 사용하고자 하는 분야에서 '센서 퓨전 슬램' 기술 적용 사례가 생기고 있다.
최근 중국 샤오미는 로봇 청소기에 '센서 퓨전 슬램'기술을 탑재한 신제품을 출시했다.
기존 센서 퓨전 슬램 기술을 중소기업은 주로 오픈소스를 활용해 개발해왔다. 맥스트 '센서 퓨전 슬램'은 기존의 오픈소스인 '빈스 모노(Vins_Mono)'나 'ORB SLAM 2'보다 성능 우위를 갖는다고 회사측은 설명했다.
관련기사
- 맥스트, 산업용 통합 AR 서비스 'MAXWORK' 정식 출시2020.07.07
- 맥스트, 과기정통부 VPS 사업 선정2020.05.22
- 맥스트, AR 산업용 솔루션 무료 체험판 제공2020.04.06
- 맥스트, 퀄컴 XR 엔터프라이즈에 등재2020.03.17
맥스트 측은 “AR 분야 외에 스마트안경, 무인로봇, 드론 등 '센서 퓨전 슬램' 기술을 이용하려는 여러 기업이 자신의 핵심 기술 분야에 집중할 수 있게 도움을 줄 것”이라고 강조했다.
이 기술을 이용하거나 혹은 더 자세한 정보를 알고 싶다면, 맥스트 홈페이지를 방문해 상담 신청을 남겨 전문 상담을 받을 수 있다.