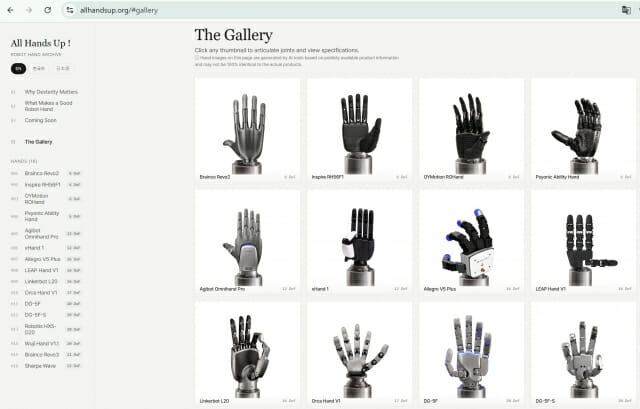
피지컬 인공지능(AI) 기업 리얼월드가 로봇 손 개발 웹사이트 '올핸즈업(All Hands Up)'을 22일 공개했다.
올핸즈업은 로봇 손의 실제 작동 성능과 설계상의 상충 관계(Trade-off)를 분석해 공개한 플랫폼이다. 리얼월드는 "어떤 로봇 손이 실제 환경에서 효과적으로 작동하는가"라는 질문에 답하기 위해 실제 운용 데이터를 기반으로 이 사이트를 개발했다.
로봇 손은 크기·악력·역구동성 사이의 상충 관계로 인해 모든 성능을 동시에 만족시키기 어렵다. 로봇 손의 크기를 줄이면 내부에 들어가는 구동 모터가 작아져 움켜쥐는 힘(악력)이 떨어지게 되고, 반대로 힘을 키우기 위해 기어비(모터에 맞물린 톱니바퀴의 비율)를 높이면 악력은 강해지지만 역구동성이 저하된다. 역구동성은 외부 힘이나 충격에 유연하게 반응하는 정도다.
리얼월드는 실제 태스크 수행 능력을 정확하게 평가하기 위해 엄지손가락 가동 범위, 손가락 끝 마디 관절의 구동 여부, 최소 파지 가능 직경(로봇 손이 잡을 수 있는 물체의 최소 지름), 손 외장 소재의 마찰 특성 등 설계 변수를 정리했다. 또한 자체 벤치마크 '덱스벤치(DexBench)'를 활용해 18종의 실세계 조작 태스크 기준으로 각 로봇 손의 특성과 한계를 분석했다.
관련기사
- 리얼월드, 로봇 파운데이션 모델 'RLDX-1' 라이브 데모 시연2026.06.10
- 리얼월드, 독자 로보틱스 파운데이션 모델 'RLDX-1' 공개..."로봇손 중 최고"2026.05.07
- 리얼월드, 칼 최 미국 대표 선임2026.03.27
- 리얼월드, 390억원 시드2 투자 유치…"전략적 투자 연합 확대"2026.02.26
올핸즈업은 리얼월드가 평가한 로봇 손들의 로봇 기술 표준 포맷(URDF) 기반 시각화 정보를 제공한다. 사용자는 고가의 전문 프로그램이나 별도의 개발 환경 없이 웹 브라우저상에서 마우스 조작으로 여러 로봇 손의 각 관절을 직접 구동해 보며 원하는 파지 형태(물건을 잡는 형태) 구현 가능 여부를 확인할 수 있다.
류중희 리얼월드 대표는 "올핸즈업은 단순한 제품 비교 웹사이트가 아니라 로봇 손 기술의 실제 운용 데이터를 공유하는 오픈 플랫폼"이라며 "일회성 공개에 그치지 않고 매 분기 정기적인 콘텐츠 업데이트해 최신 로봇 손 실증 데이터를 축적할 것"이라고 강조했다.