[평창(강원)=신영빈 기자] 국내 휴머노이드 스타트업 로브로스가 가격과 실험 효율성을 앞세운 보급형 플랫폼 개발에 속도를 내고 있다.
박현준 로브로스 이사는 5일 평창 알펜시아 컨벤션센터에서 열린 한국로봇종합학술대회(KRoC 2026) 초청강연에서 휴머노이드 로봇 '이그리스' 개발 과정을 공유했다. 그는 "휴머노이드 상용화를 위해서는 기술적 완성도뿐 아니라 가격 접근성과 연구 현장 적용성이 함께 확보돼야 한다"고 강조했다.
로브로스는 지난해 이그리스 초기 모델을 키 178cm, 체중 120kg 규모로 개발했다. 전신 관절에 30:1 기어비를 적용하며 고성능 플랫폼을 목표로 했지만, 하모닉드라이브·콜모겐 등 고가 부품 중심 구성으로 재료비만 2억원 이상 투입되는 한계를 확인했다.

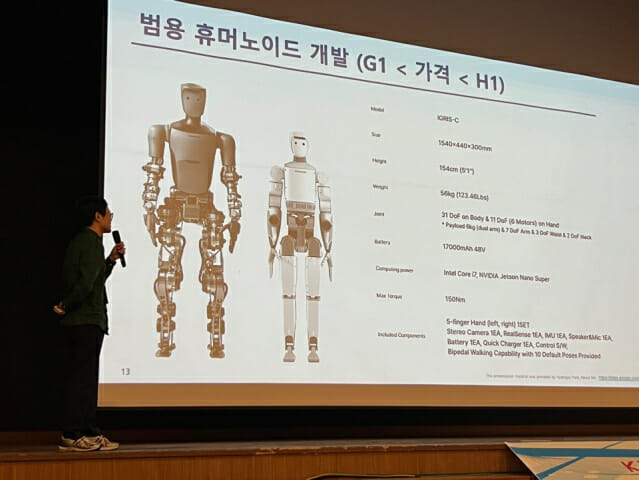
이에 두 번째 모델인 '이그리스C'를 개발했다. 이그리스C는 키 154cm, 무게 56kg 수준으로 경량화했으며, 판매 가능한 가격대를 목표로 설계됐다.
박 이사는 "무겁고 비싼 로봇은 실험 자체가 어렵다. 기업이 상품을 만드는 방향으로는 고민이 필요했다"며 "유니트리 G1과 H1 사이 가격대에서 시장성을 확보하는 것이 목표"라고 말했다.
특히 학습 기반 알고리즘 적용을 고려해 QDD 구동기 컨셉을 채택했고, 평균 16:1 기어비 수준으로 개발됐다. 보행 실험 기준 배터리 지속시간은 약 2시간이며, 무릎 관절 토크는 약 150Nm 수준이다.
로브로스는 구동기 일부를 중국산으로 조달하지만, 기구 설계부터 조립, 전장, 제어, 소프트웨어까지 대부분을 자체 개발하고 있다. 로봇 제작 과정에서는 CAN 통신 기반 제어 시스템, 자체 배터리 설계, 원격 조종 앱 개발 등 운영 인프라도 함께 구축했다. 로봇 상태를 LED로 표시하는 인터랙션 설계도 적용했다.
이그리스C는 로보티즈 모터 기반 텐던 방식 6자유도 인간형 핸드를 탑재했다. 로브로스는 텔레오퍼레이션으로 약 300회 이상 물체 조작 데이터를 수집하며 모방학습 기반 조작 기술도 개발 중이다. 데이터 구간 라벨링, 관절 데이터 관리, 통계 프로그램 등 자체 데이터 파이프라인 구축도 병행하고 있다.
보행 분야에서는 강화학습(RL)을 적용해 기본적인 스탠딩·푸싱 테스트를 수행하고 있으며, 인터넷 기반 인간 행동 데이터를 로봇에 리타겟팅하는 연구도 진행 중이다. 박 이사는 "모방학습보다 보행 강화학습이 훨씬 직관적이고 GPU 부담도 적다"며 개발 현장 현실을 전했다.
관련기사
- 로브로스, CES 2026서 휴머노이드 '이그리스-C' 선봬2025.12.31
- "물류 휴머노이드 온다…데이터 확보는 숙제"2026.02.01
- "로봇 조작, 기존 RFM만으로 안 된다…다른 길 찾아야"2026.02.05
- 국내 로봇 연구진 2천명 한자리…'KRoC 2026' 개막2026.02.05
박 이사는 휴머노이드 산업을 '봄'에 비유하며 "피지컬 AI는 아직 챗GPT 수준에도 도달하지 못했다. 이를 담아낼 휴머노이드 플랫폼도 이제 시작 단계"라고 말했다. 로브로스는 경남 로봇랜드 전시 운영, 대학 연구기관 납품, 물류 설비 버튼 조작 등 초기 적용 사례를 확보하며 시장 가능성을 시험하고 있다.
박 로브로스 이사는 서울대 융합과학부에서 석·박사 학위를 받은 휴머노이드 로봇 연구자다. 한국생산기술연구원과 한국로봇융합연구원에서 인간형 로봇 및 제어 분야 연구 경험을 쌓은 뒤, 2021년부터 로브로스에서 휴머노이드 플랫폼 개발을 이끌고 있다. 최근 휴머노이드 '이그리스' 시리즈를 중심으로 보급형 하드웨어 설계와 학습 기반 조작·보행 알고리즘 연구를 병행하고 있다.