"보행은 넘어지면 안 된다는 조건이 있지만, 물체를 잡는 쪽은 어떤 게 그래스핑이 잘 됐는지 없는지 확인할 수 있는 방법이 없습니다. 정의가 안 됐어요."
배지훈 한양대 로봇공학과 교수는 13일 서울 서강대에서 열린 '제1회 한국로봇학회 전문가 심포지엄'에서 로봇 손·그리퍼 연구 25년을 돌아보며 조작 분야가 안고 있는 근본적 난제를 짚었다.
보행 제어는 지지 다각형 안에 무게 중심을 두는 식으로 안정 조건을 비교적 명확히 수식화할 수 있지만, 로봇 손이 물체를 잘 잡고 있는 상태를 수식으로 표현하는 일은 아직도 어렵다는 지적이다.
배 교수는 "겉보기엔 로봇 손이 물건을 잘 잡은 것처럼 보이지만, 어떤 상태를 좋은 그래스핑이라고 컴퓨터에 알려줄 수 있는 수식이 없다"고 강조했다.

물리 시뮬레이터에 대한 문제도 언급했다. 그는 "물체를 잡고 움직이는 정밀 조작에서 컨택 모델도 재질 모델도 정확히 넣기 어렵고, 롤링이나 말랑말랑한 접촉이 제대로 표현 안 된다"고 말했다. 이 때문에 상용 시뮬레이터로 학습한 결과가 실제 로봇 손 조작으로 이어지기 어렵다는 설명이다.
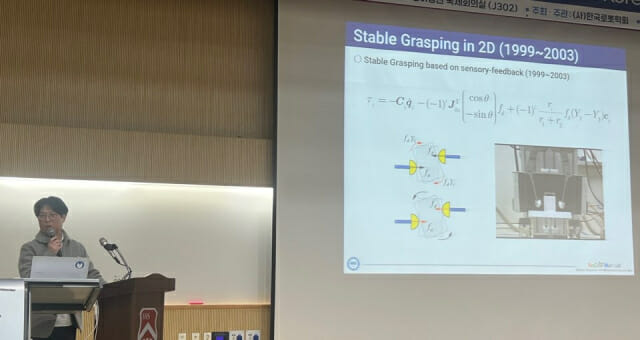
배 교수는 2000년대 초반, 제대로 된 로봇 핸드도, 시뮬레이터도 없던 시절 직접 소프트 핑거와 물체의 롤링·접촉 제약을 모두 포함한 시뮬레이터를 만들었다.
손가락 끝을 반구 형태로 두고 미끄럼 없는 롤링을 가정한 뒤, 물체 표면 위 두 접촉점 사이의 거리 차이 y1–y2가 0에 가까워지면 '잘 잡힌 상태'라고 정의하는 그래스핑 기준을 제시했다. 이 수식 하나로 물체를 잡은 뒤 회전·이동까지 동시에 제어하는 실험을 2001년 무렵부터 구현했다는 설명이다.
촉각 센서가 사실상 없는 상황에서 관절 엔코더 정보만으로 그래스핑을 시도한 사례도 소개됐다. 팩이 눕거나 구멍 방향이 안 보일 때 손가락으로 물체를 더듬어 구멍 위치를 찾고 필요하면 굴리거나 넘겨 자세를 바꾼 뒤 꽂는 방식이다. 배 교수는 2004년경부터 이를 '블라인드 그래스핑'이라 부르며 연구해 왔다.
조작 난이도에 대한 체감 이야기도 나왔다. 배 교수는 "과학관 강연에서 로봇 손 데모를 보여주면 초·중학생들이 '그것밖에 안 돼요?'라고 한다"며 "잡고, 돌리고, 신발 끈을 묶는 수준은 여전히 로봇이 못 따라가는 영역"이라고 했다.
인간 뇌의 감각·운동 피질 상당 부분이 손에 할당돼 있다는 점을 들며 "로봇 조작이 보행보다 훨씬 어려운 게 이상한 일은 아니다"라고 덧붙였다.
배 교수는 원래 AI·학습을 좋아하지 않았다고 밝히면서도, 상위 단계 작업 스케줄링·플래닝은 사람이 일일이 규칙을 짜기엔 경우의 수가 너무 많아 일부 학습 기법을 도입했다고 설명했다.
관련기사
- 로보티즈 '로봇 손', 글로벌 빅테크 선주문 받아2025.10.23
- 로봇 손으로 '문워크' 춤췄다…美 IEEE 스펙트럼 소개2025.10.12
- 손재주 있는 로봇, 이번엔 종이접기 시연2025.09.29
- 생각만으로 움직이는 '로봇 손' 나왔다2025.07.05
손목 카메라로 작업 공간을 한 번 스캔한 뒤, 가장 빠르면서도 실패 위험이 적은 동작 시퀀스를 리워드로 두고 학습시키는 방식이다. 하위 제어는 기존 모델 기반 제어를 유지한 채, 상위 레벨만 학습으로 보완하는 구조다.
배 교수는 화려한 딥러닝 성능 숫자를 제시하기보다 "그래스핑은 아직 정의부터 어렵다"는 직설적인 문제의식을 공유했다. 그럼에도 여전히 해결되지 않은 수많은 과제들에 대한 뚜렷한 열의를 드러냈다.