국내 농가의 인력 부족 문제를 해결할 수 있는 수단으로 로봇이 주목받고 있다. 로봇 팔이 이동하면서 모종을 인식해 옮겨 심을 수 있는 기술이 최근 개발됐다.
19일 한국생산기술연구원은 특수목적로봇그룹 양승환 수석연구원 연구팀이 로봇 전문업체 코보시스, 전동특수차 전문업체 화인특장과 함께 '무인 자동화 스마트팜 정식로봇'을 공동 개발했다고 밝혔다.
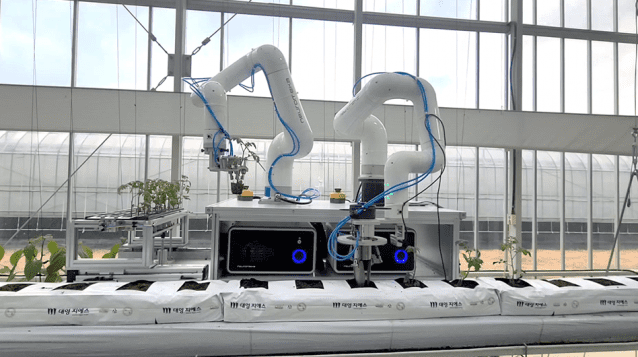
로봇은 두 개의 팔과 자율주행 이동체로 구성됐다. 한 쪽 로봇 팔이 모판에서 모종을 뽑아내고, 다른 팔로는 재배용 배지를 파낸 후 사람 없이도 독자적으로 모종을 옮겨 심을 수 있다.
'정식'은 식물을 다른 장소에 옮겨 심는 작업이다. 스마트팜 농가에서는 사람이 모판을 들고 다니며 코코피트 배지라 불리는 인공 토양에 모종을 일일이 옮겨 심는 방식으로 작업한다.
재배 시기를 맞추려면 전 면적에 걸쳐 빠르게 모종을 심어야 한다. 평균 4~5개월에 한 번 꼴로 2~3일만 작업하면 되는 단기인력 구하기가 점점 어려워지고 있는 실정이다.
또 여린 모종을 단단한 배지에 옮겨 심는 작업은 단순하지만 섬세함과 근력을 동시에 요구하기 때문에 사람의 손길 외에 기계화가 어려운 영역으로 인식돼 왔다.

개발된 무인 자동화 스마트팜 정식로봇은 모판에서 개별 모종의 위치를 파악해 한 개씩 뽑아내고, 옮겨 심어야 할 배지의 위치를 인식해 파낸 후 뽑아낸 모종을 정식하는 순서로 작업을 수행한다.
연구팀은 스마트팜 농가에서 가장 많이 재배하는 토마토, 파프리카 모종을 정식할 수 있는 무인 자동화 로봇 구현을 위해 활용도가 높은 40공 모판을 활용했다. 한 재배 라인의 모종 정식이 끝나면 자율주행 이동체가 다음 재배 라인의 정식 위치로 이동해 순차적으로 작업을 수행한다.
정식로봇이 모종 위치와 정식할 배지 위치를 정확히 인식할 수 있는 것은 인공지능(AI)을 활용한 영상인식 기술 효과다.
토마토 모종과 파프리카 모종의 형상이 다르고, 같은 품종이라도 각각 형상이 조금씩 다르다. 연구팀은 AI 학습을 통해 잎, 줄기의 모양과 숫자, 높이가 다른 다양한 모종의 형태를 로봇 스스로 인식할 수 있게 했다.
코코피트 배지는 길이나 두께, 배지를 감싸는 비닐의 무늬와 색상, 모종을 심을 구멍의 크기 등이 다양한데, 이러한 개별 특성을 파악해 모종이 심어질 위치를 인식하고 로봇 팔이 해당 위치를 스스로 찾아 작동하며 자동으로 정식이 이루어지는 구조다.
이번 성과는 스마트팜연구개발사업단의 지원으로 추진됐다. 생기원 총괄 아래 코보시스가 로봇팔을, 화인특장이 이동플랫폼을 개발했다.
관련기사
- 인간-로봇 공존 작업 현장, 디지털 트윈으로 위험 미리 예측2023.12.14
- 로봇진흥원-생기원, 제조혁신 지원사업 성과발표2023.12.07
- 생기원, 'K-제조업' 디지털 전환 돕는다2023.11.16
- 250Kg 강원랜드 카지노 현금박스, 로봇이 옮긴다2024.01.19
이들은 2021년 4월 연구에 착수한지 2년 8개월 만에 성과를 냈다. 지난 9~12일(현지시간) 미국 라스베이거스에서 열린 CES 2024에서 미국 로봇 전문기업과 로봇 공급에 관한 양해각서(MOU)를 체결하기도 했다.
개발을 이끈 생기원 양승환 수석연구원은 "정식로봇이 구현된 자율주행 이동체는 다양한 스마트팜 농작업에 적용할 수 있도록 개발됐다"며 "조만간 청소로봇, 적엽로봇, 방제로봇, 인식로봇을 순차적으로 공개할 계획"이라고 밝혔다.