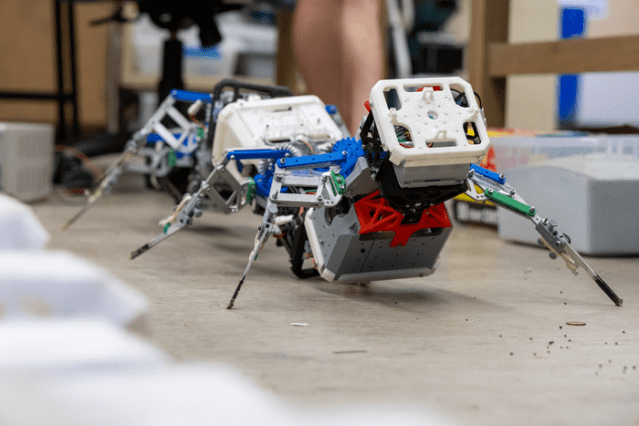
지네 형상을 한 로봇이 등장했다. 로봇은 수 많은 다리로 긴 몸을 이끌며 복잡한 지형에서도 안정적으로 움직인다. 꿈틀거리는 모습은 마치 벌레를 연상시킨다.
조지아 공과대학 연구팀은 '지네 로봇' 연구 논문을 지난 4일 사이언스지에 발표했다. 연구팀은 로봇에 다리 한 쌍을 추가할 때마다 보행하기 어려운 지형에서 안정적으로 움직일 수 있다는 '공간 중복성' 이론을 세웠다.
연구팀은 실험 과정에서 6개 다리를 가진 로봇부터 시작해서 16개까지 늘려 테스트를 진행했다. 결과적으로 다리 수가 증가하면서 별도 센서를 추가하지 않아도 로봇이 울퉁불퉁한 표면에서 보다 민첩한 움직임을 보였다.
지금까지 대부분의 로봇은 주변 환경을 해석하기 위해 수 많은 센서에 의존했다. 특히 2족·4족 로봇의 움직임을 제어하려면 고도의 기술이 필요했다.
이번 연구 결과는 센서에 의존하지 않고도 로봇을 험지에서 안정적으로 운용할 수 있다는 점에서 의의가 있다. 센서는 비싸고 취약하며, 환경이 너무 빨리 변해서 센서 컨트롤러 응답 시간이 충분하지 않을 수 있다는 것이 연구팀 측 설명이다.
관련기사
- 中 텐센트, 사람에 더 가까워진 손·팔 로봇 공개2023.05.01
- 美 카네기멜론대, 사족로봇 협로 보행기술 공개2023.04.25
- 바다 쓰레기 청소하는 '해파리 로봇' 등장2023.04.27
- "더 비싸졌다" vs "부담 줄었다"…배달앱 상생안 놓고 충돌2024.11.18
연구팀은 이 로봇이 환경 감지 능력이 제한된 상황에서도 수색과 구조 활동, 화성 탐사 등 다양한 응용 분야로 활용될 것으로 기대하고 있다.
연구에 참여한 한 연구원은 "남은 과제는 가장 효율적으로 필요한 최소 다리 개수를 구하는 것"이라며 "복잡한 시스템에서 에너지, 속도, 전력 등 균형 요소를 고려할 필요가 있다"라고 전했다.