



형상기억 합금의 구동 속도를 높여 실제 사람이나 동물의 신체 기관과 비슷하게 움직이는 인공근육을 만드는 기술이 나왔다. 이를 바탕으로 수화를 하거나 피아노로 동요를 연주하는 의수도 만들었다.
한국연구재단(이사장 이광복)은 KAIST 오일권 교수 연구팀이 인공근육을 활용한 착용형 의수와 고양이의 독특한 발톱 구조에서 착안한 생체 모방 로보틱스를 개발했다고 29일 밝혔다.
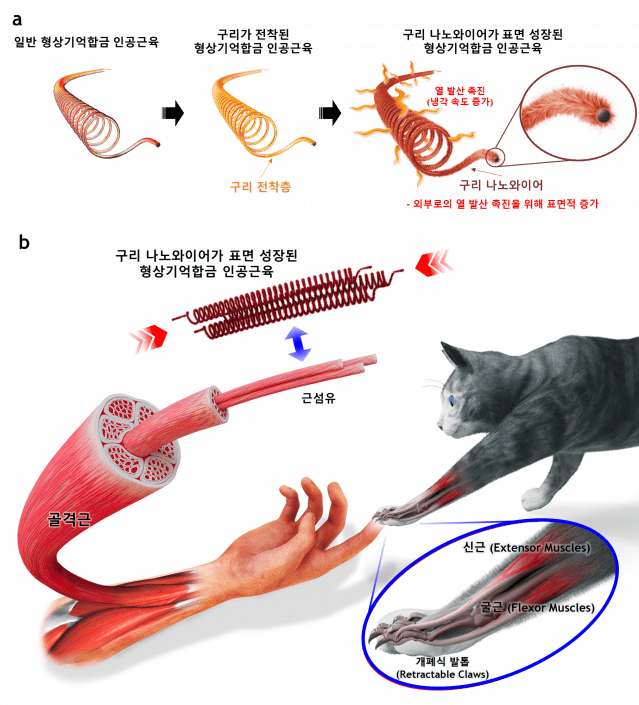
형상기억 합금은 온도가 올라가면 미리 기억된 형태로 수축하고, 온도가 내려가면 이완되며 움직임을 일으킨다. 이같은 성질을 이용해 형상기억 합금으로 만든 스프링을 인공근육으로 활용하기 위한 연구가 활발하다.
하지만 기존 형상기억 합금은 가열에 비해 냉각에 시간이 오래 걸려 인공근육의 구동 속도를 높이는데 한계가 있다. 일정 속도로 반복 구동해야 하는 분야에는 응용하기 어렵다. 별도 냉매나 냉각 팬을 쓰면 전체 크기가 늘어나 실용성이 떨어진다.
이 문제를 해결하기 위해 연구진은 스프링 모양 형상기억 합금 표면에 뾰족한 구리 나노와이어를 균일하게 성장시켰다. 전자부품이나 반도체의 온도를 빠르게 낮추기 위해 표면에 뾰족한 방열판을 붙이는 것과 비슷한 원리다.
나노와이어를 성장시켜 형상기억 합금의 표면적을 넓히고, 열이 외부로 쉽게 전달되게 해 냉각 속도를 높였다. 연구팀이 개발한 인공근육은 일반 형상기억합금을 쓴 인공근육보다 구동 속도가 2배 이상 빨라졌다.
이 인공근육으로 실제 손과 비슷한 속도로 손가락을 굽히고 펼 수 있는 의수도 개발했다. 무게는 사람 손의 절반 수준이다. 컴퓨터 비전을 통해 인식한 사람 손의 움직임을 따라 의수의 인공근육을 제어, 의수가 수화를 하게 했다. 의수가 달걀 같은 섬세한 물건을 들어올리고, 피아노로 동요를 연주할 수 있음도 보였다.

연구팀은 이 인공근육을 생체모방 로보틱스에도 응용했다. 필요에 따라 드러내거나 감출 수 있는 고양이 발톱을 흉내낸 생체모방 개폐식 발톱을 구현했다.
고양이가 발톱을 드러냈다 감췄다 하며 지면과의 마찰을 제어하는 것처럼, 보행 로봇이 울퉁불퉁한 길에서 중심을 잡고 안정적으로 걸을 수 있게 하는데 응용될 수 있다.
관련기사
- 컴퓨터 '두뇌' 없어도 길 찾는 소프트 로봇 개발2022.05.24
- 민들레 홀씨 되어 날아간 센서2022.03.17
- 퀄컴, 로보틱스 사업 확장...'RB6 플랫폼' 공개2022.05.11
- 엔젤로보틱스, B2C 웨어러블 로봇 시장 공략 집중2022.05.16
이번 연구가 앞으로 인공근육을 웨어러블 로봇이나 휴먼 증강 슈트, 보조 로봇, 착용형 근육 등 다양한 분야에 응용할 실마리를 제공할 것으로 연구진은 기대했다.
이번 연구는 과학기술정보통신부와 한국연구재단이 추진하는 리더연구지원사업(창의연구)의 지원으로 수행됐으며, 학술지 '어드밴스드 펑셔널 머티리얼스(Advanced Functional Materials)' 표지 논문으로 선정됐다.





