네이버랩스가 11일 열린 한국기계연구원(KIMM) 주최 ‘2020 글로벌 기계기술 포럼’에서 사람의 운동지능까지 학습 가능해진, 더욱 고도화한 로봇 기술 연구 성과를 공개했다.
이날 포럼은 세계적인 로봇 전문가들과 함께 코로나 확산 속 일상의 변화를 이끌어 낼 다양한 로봇기술을 조망하기 위해 마련됐다.
연사로 나선 석상옥 네이버랩스 대표는 이 자리에서 SW·HW적으로 한 단계 진일보한 로봇팔 앰비덱스와 실내 자율주행 로봇 플랫폼 ‘어라운드’의 새로운 버전을 공개했다.
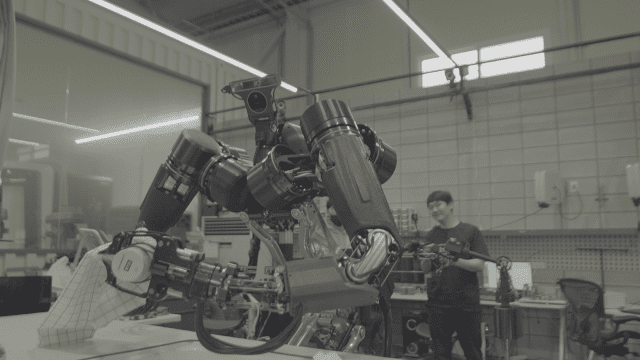
발표의 하이라이트는 진화를 거듭 중인 ‘앰비덱스’다. 가장 큰 변화는 사람의 복잡하고 비정형적인 움직임까지 데이터화해 학습할 수 있게 된 학습 러닝 능력, 일명 '운동지능’을 갖추게 됐다는 것에 있다.
석상옥 대표는 “큰 도전과제였던 ‘운동지능’을 실제 구현한 첫 사례로, 한국의 로봇 기술이 전세계 로봇 연구를 한 단계 더 진보시킬 단초가 될 수 있을 것”이라고 말했다.
네이버랩스는 이를 위해 사람의 섬세한 힘 제어 능력을 로봇이 학습할 수 있는 데이터 형태로 추출할 수 있도록 앰비덱스 전용 햅틱 디바이스를 자체 개발했다. 사람과 동일한 크기를 가진 이 전용 햅틱 디바이스는 ▲사람의 팔과 같은 7자유도 ▲사람과 로봇 양방향으로 힘이 전달되는 원격 제어Bilateral Teleoperation 등의 특징을 바탕으로 사람이 직접 수행한 데모 모션(움직임)으로부터 세심한 힘/위치 조절 데이터를 인식한 뒤, 로봇의 학습 데이터로 활용한다.
이어 그는 “햅틱 디바이스와 강화학습 등으로 로봇을 학습시키는 방식은 단 하나의 데모를 통해서도 사람의 개입 없이 로봇 스스로 의도에 맞는 작업 수행이 가능할 정도로 정확도와 효율이 뛰어나다”고 덧붙였다. 또 이번에 공개한 앰비덱스에는 허리부가 추가되어 작업 반경이 더욱 확장됐고, 센서헤드로 대상을 인식할 수 있으며, 파지把持 방법을 다양하게 바꿀 수 있는 로봇손 'BLT 그리퍼'도 장착됐다.
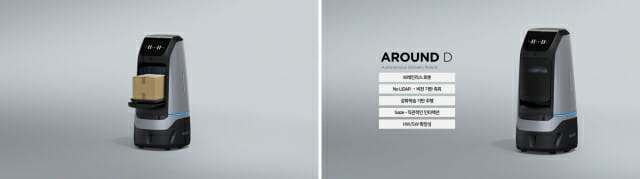
석 대표는 자율주행 로봇 어라운드AROUND 시리즈의 4번째 모델로, 딜리버리에 특화된 ‘어라운드D’도 공개했다. 기존 모델처럼 고가의 라이다LiDAR 센서 없이도 비전Vision 기술과 강화학습 기반의 자연스러운 자율주행이 가능하며, 직전 모델 어라운드C에 적용된 ‘게이즈gaze’ 인터페이스를 통해 이동 및 서비스 과정에서 로봇이 사람과 직관적인 인터랙션이 가능하도록 설계했다.
관련기사
- 카이스트 출신 자율주행차 기업 모라이, 20억 투자 유치2020.09.23
- 기아차-코드42, EV기반 모빌리티 기업 ‘퍼플엠’ 설립2020.07.20
- 네이버랩스, 성남시 AI·자율주행 생태계 키운다2020.07.13
- 자율주행시대 대비한 '서울시 3D 지도' 나왔다2020.06.18
석 대표는 “어라운드D 역시 네이버 클라우드가 로봇의 두뇌 역할을 대신하는 브레인리스 로봇 기술이 적용됐으며, 현재 로봇 친화형 빌딩으로 건축 중인 네이버 제2사옥에서 사용될 로봇들 중 하나가 될 것”이라며 “어라운드제로라는 HW/SW 기본 플랫폼에 다양한 서비스 어플리케이션을 추가할 수 있도록 설계해 확장성이 큰 만큼, 앞으로 더 다양한 서비스 로봇들을 선보여 나갈 수 있을 것”이라고 말했다.
마지막으로 석 대표는 "네이버의 로봇 연구는 로봇들이 이동하면서 실제 서비스를 제공할 실내·외 및 도로 공간들에 대한 고정밀 지도 연구부터 시작해, 클라우드 기반의 로봇 제어 시스템, 나아가 사람의 운동지능을 학습하는 태스크러닝 도구 개발에까지 이르렀다"며 "언택트 시대 더욱 주목받고 있는 로봇이 일상 공간에 들어오기 위해서는 로봇을 둘러싼 환경, 그리고 공존의 대상인 사람에 대한 연구가 더 필요하다"고 강조하며 발표를 마무리했다.