"자율주행차, 드론 제조사들은 물리 공격에 대해 신경쓰지 않고 있는 듯하다. 현재 만들어지는 센서 대부분이 취약한 상태로 출시된다. 이런 측면에서 새로운 센서들이 별로 없다."
김용대 한국과학기술원(KAIST) 교수는 11일 '보안의 현재와 미래' 온라인 세미나에서 이같이 말했다.
김용대 교수에 따르면 자율주행차, 자율주행 드론 등 무인이동체의 설계 방식과 기능을 고려한 보안 대책이 미비한 상황이다. 무인이동체가 갖는 특징과 구동 방식, 기능을 고려한 보안 시스템이 필요하지만 이는 쉽지 않은 과제다. 무인이동체에 대한 개발 표준이 정형화돼있지 않은 탓이다. 이 때문에 무인이동체에 대한 체계적인 분석이 어렵고, 제조사별로 제품 개발과정이 천차만별이기 때문에 각각 어떤 솔루션을 구현하는지 정확히 파악하기도 어렵다.
이런 상황인만큼, 주요 제조사가 개발한 무인이동체에서도 보안 위협이 여럿 보고되고 있다.
무인이동체의 경우 특히 공격자가 나타나더라도 안전성을 유지할 수 있는지가 관건이다. 공격 때문에 의도하지 않은 곳에 도착하거나, 다른 물체와 충돌하거나, 비행 도중 추락하는 사태를 막아야 한다.
기기가 만약 장애를 일으킬 경우 문제 상황이 발생하지 않도록 하는 모드가 '페일 세이프(Fail safe)'다.
김용대 교수는 "드론의 경우 신호를 잡지 못할 경우 상공에서 멈춰 있는(호버링) 등의 방식으로 어느 정도 페일 세이프 모드가 구현돼 있었다"면서도 "기기들을 분석해본 결과, 분석한 기기 전부 페일 세이프 모드를 우회할 수 있었다"고 말했다.
김용대 교수는 실제 DJI 팬텀 3에 GPS 신호를 위조해(스푸핑) 원하는 방향으로 이동하게 할 수 있었다고 밝혔다.
GPS 스푸핑을 막기 위해 강도가 센 신호를 무시하거나, 복수의 안테나를 이용하거나, 이동통신 기지국과의 거리 차이 등을 이용한 방법 등이 나와 있다. 그러나 이런 방법들이 실효성과 비용 등의 한계를 갖고 있다는 분석이다.
김 교수는 자율주행차에 탑재되는 센서들이 지닌 취약성에 대해서도 언급했다. 센서는 반사된 빛으로 3차원 이미지를 복원하는 LIDAR, 같은 방식에 무선 신호를 사용하는 RADAR, 소리를 이용한 SONAR, 그리고 카메라 센서 등으로 구분된다.
이 센서들의 경우 센서가 참고하는 값에 변화를 주면 운전에 이상을 초래할 수 있다는 분석이다.
가령 빛을 참고하는 LIDAR의 경우 센서 수신부에 강한 빛을 비췄을 때 정상적으로 기능이 작동하기 어렵다. 센서 작동 원리를 고려할 때, 공격자가 빛을 이용하면 자동차 센서가 실제로는 없는 장애물을 있다고 인식하게 하거나 그 반대의 행동도 가능하다는 분석이다.
관련기사
- '구글→우버' 갈아탔던 스타 개발자, 끝내 파산2020.03.05
- 2025년 교통체증 없는 ‘도심 하늘길’ 열린다2020.06.04
- 자율주행시대 대비한 '서울시 3D 지도' 나왔다2020.06.18
- 전기차 충전할 때 흘러가는 내 정보, 안전할까2020.02.12
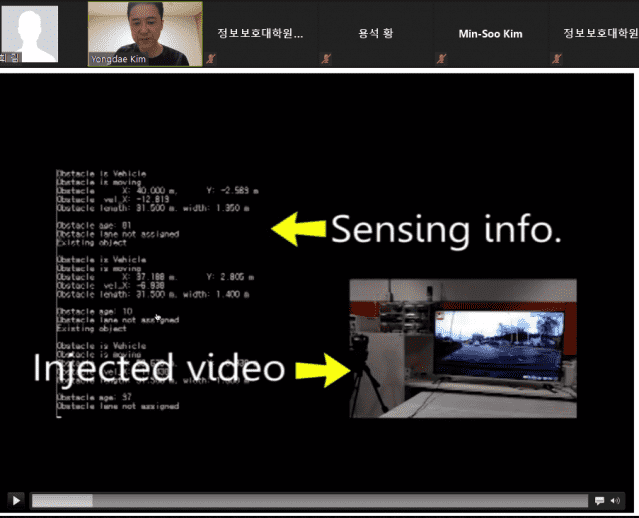
마찬가지로 카메라 센서는 카메라로 이미지를 인식하는 과정에서 나타나는 오류들이 있다. 김 교수는 "스마트TV를 통해 자동차가 움직이는 영상을 보여줬을 때 인간은 이걸 촬영된 영상이라 인식하지만, 카메라 센서는 자동차가 몇 대인지, 거리는 어느 정도인지에 대한 값을 내놨다"며 "바닥에 빔 프로젝터로 사람 형상을 비췄을 때 차량이 멈추고, 차를 그린 이미지도 차량으로 인식하는 등의 모습도 보였다"고 밝혔다.
김 교수는 "갑자기 자동차 센서가 앞을 못 보게 됐을 때 페일 세이프 모드로 전환될 수 있어야 한다"며 "어떤 식으로 이 모드를 구현할지에 대해 실질적인 준비가 돼 있지 않아 여러 문제가 나오고 있다"고 지적했다.