미국 매사추세츠공대(MIT) 컴퓨터과학 인공지능연구소(CSAIL) 연구진이 케이블 선이나 시트 등 얇고 가늘고 유연한 물체를 섬세하게 다룰 수 있는 로봇 그리퍼를 개발했다고 엔가젯 등 주요 외신들이 13일(현지시간) 보도했다.
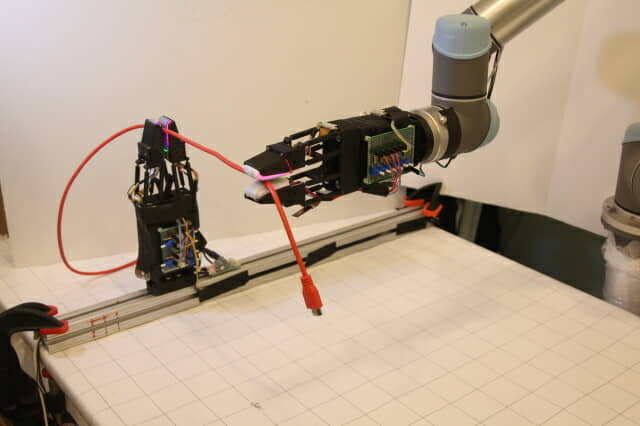
개발된 로봇 손은 사람 손처럼 얇은 선을 다룰 수 있다. CSAIL 연구진은 부드러운 재질로 만들어진 로봇 그리퍼에 케이블 선의 위치를 감지할 수 있는 센서를 탑재해 로봇이 선을 푸는 등 간단한 작업을 수행하는 동안 가는 선을 잘 잡고 조작할 수 있도록 했다.
로봇 손은 부드러운 고무 소재에 작은 카메라가 탑재됐고 젤사이트(GelSight)라는 기술을 통해 고해상도 촉각정보를 제공하도록 했다. 이 센서는 그리퍼의 두 손가락 사이에서 케이블 선이 배치되는 방식과 선이 손가락 패드 사이를 지날 때 생기는 마찰력을 측정해 케이블 선에 어느 정도의 힘이 가해지는 지를 측정하면서 선을 다루게 된다.
MIT 대변인 레이첼 고든 대변인은 로봇이 얇고 유연한 선을 다루는 것은 너무나 어려운 일이라고 밝혔다. 그 이유는 얇은 선이 로봇 손가락에서 빠지지 않도록 하면서, 동시에 선이 부드럽게 미끄러지듯 이동시키면서 다뤄야 하기 때문이다.
공개된 영상에서 개발된 로봇 손은 유선 이어폰 선의 끝을 찾아 기기 단자에 끼우는 등 몇 가지 작업을 수행하는 모습을 볼 수 있다. (▶ 자세한 영상 보기)
관련기사
- 英 대학, 단순 반복 연구 사람보다 1000배 빠른 실험실 로봇 개발2020.07.09
- 로봇 개, 이번엔 야구장 치어리더로 변신2020.07.08
- 로봇 개 스팟, 마침내 출시...“가격 9000만 원”2020.06.17
- 똑똑한 중국산 로봇개, 美 라이벌 2배 속도로 뛴다2020.05.14
하지만, 로봇이 모든 케이블 선을 깔끔하기 처리까지는 약간의 시간이 더 걸릴 것으로 보인다. 실제 실험에서 로봇 손은 손가락 끝에 선이 도달했을 때 케이블을 다시 뒤로 당기는 데 어려움을 겪었다. 연구진은 그 이유가 젤사이트 센서의 바깥쪽으로 구부러진 표면 때문이라고 분석하고 손가락 센서 모양을 개선하려고 노력 중이다.
향후 이 로봇은 가정에서 옷을 개거나 산업현장에서 와이어 성형 등의 분야에서 사용될 수 있을 것으로 전망된다.