네이버랩스(대표 석상옥)가 매핑측위 분야의 기술과 데이터를 국내 연구자들과 공유, 관련 분야의 기술 도약을 도모하고자 '네이버랩스 매핑&로컬라이제이션 챌린지'를 진행한다.
네이버랩스는 자율주행머신을 활용해 도심 속 공간들의 이동이 자동화되는 미래도심환경(A-CITY)을 겨냥한 기술을 연구 중이다. 이 일환으로 고정밀 지도(HD맵)와 고정밀 측위 기술을 고도화 중이다. 지난 2019년 컴퓨터 비전딥러닝 분야에서 세계 최고 권위를 가진 학회인 'CVPR 2019'에서 글로벌 IT기업들을 제치고 1위를 차지한 R2D2 기술이 대표적인 사례다.
이번 챌린지는 네이버랩스가 자체 구축한 정밀지도 데이터를 국내 기술자들과 공유함으로써 시각적 측위(Visual Localization) 기술과 관련된 분야의 연구를 보다 활성화시키기 위한 취지로 준비됐다. 국내 대학교에서 관련 분야를 연구 중인 내국인 대학(원)생이라면 누구나 챌린지에 참여할 수 있으며, 최대 3명까지 팀 구성이 가능하다.
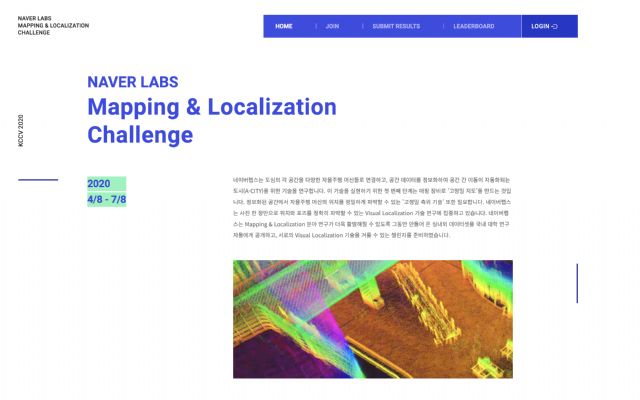
참가자들은 네이버랩스가 제공한 임의의 사진과 매핑 공간에 대한 데이터가 포함된 여러 실/내외 데이터셋 중 하나 이상을 선택한 뒤, 해당 사진이 촬영된 구체적인 장소의 정보값을 제출하면 된다. 위치 정보값 추정에 사용하는 방법론에는 별도로 제한이 없으며, 6월27일까지 추정한 위치 정보값을 최종 업데이트하기만 하면 된다. 온라인에서 실시간으로 순위 확인도 가능하다.
관련기사
- 네이버 개발 중인 '실내 AR 내비게이션' 어디까지 왔나2020.04.09
- 네이버, 글로벌 석학들과 AI·로봇 미래 논의2020.04.09
- 네이버랩스 “HD 맵 데이터셋 외부에 개방”2020.04.09
- [영상] 네이버, 백덤블링 하는 ‘미니치타’ 로봇 공개...文 대통령도 ‘깜짝’2020.04.09
가장 정확한 위치 정보값을 제출한 6팀에게는 총 2천만원 규모의 상금이 주어지며, 1위를 기록한 팀 전원에게는 네이버랩스 인턴십 프로그램에 참여할 수 있는 기회가 제공된다. 또 모든 수상팀들은 7월 8일 예정된 KCCV(Korean Conference on Computer Vision) 2020에서 발표를 하게 될 예정이다.
백종윤 네이버랩스 자율주행그룹 부문장은 "챌린지 기간 중 대학 연구자들이 온전히 연구에만 집중할 수 있도록 지원할 계획"이라며 "어려운 상황 속에서도 국내 해당 분야의 기술 수준을 한층 더 고도화할 수 있는 계기가 되기를 기대한다"고 말했다.