지렁이처럼 꿈틀거리면서 나아가는 지렁이 로봇이 세계최초로 개발됐다. 서울대·매사추세츠공대(MIT),하버드대 연구팀이 공동으로 개발한 지렁이로봇(Mesh Robot)이 주인공이다.
MIT뉴스는 10일(현지시간) 한국과 미국 3개대 공동 연구팀이 마치 지렁이처럼 근육을 모았다고 다시 늘리면서 나아가는 인공근육을 적용한 지렁이로봇(mesh worm)을 개발했으며 네이처지 게재를 추진중이라고 보도했다.
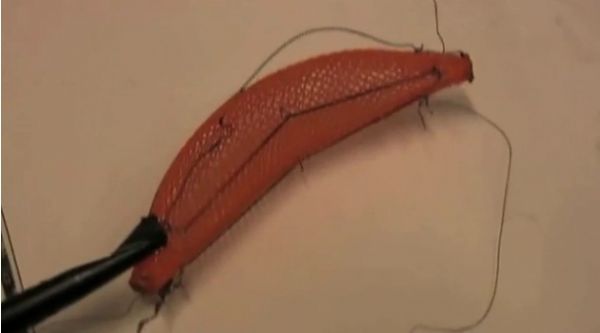
지렁이 로봇은 흐느적흐느적하고 민달팽이같은 로봇인데 몸을 오므렸다가 다시 길게 늘려 나아가는 인공근육을 사용해 전진한다. 느릿느릿한 이 지렁이의 연동운동은 사람이 음식을 먹고 식도을 넘겼을 때의 모양과도 유사하다.
이 인공근육을 사용하는 지렁이로봇은 니켈과 백금선으로 만들어진 폴리머 그물눈(mesh tube)로 이뤄졌는데 내부에 배터리와 집적회로를 가지고 있다. 이 지렁이 로봇의 부드러운 폴리머 몸체는 충격을 흡수하게 돼 있다. 따라서 밟아도 이 벌레로봇을 없앨 수가 없다.
보도에 따르면 김상배 MIT 기계공학과 조교수팀 등이 이 지렁이로봇을 개발, 거칠고 좁은 환경에서 긴요하게 사용될 것으로 기대하고 있다. 이 벌레로봇은 지렁이처럼 평평하지 않은 지형을 포함해 어느 곳으로든 다닐 수 있다는 점에서 군사적 활용가능성도 점쳐지고 있다. 또한 민간분야에서는 임플랜트나 의수, 내시경 등 의료분야와 전자제품 등에서 다양한 활용이 점쳐지고 있다.
하지만 이 로봇의 가장 뛰어난 특징은 어떤 가혹한 환경에서도 쉽사리 손상되지 않는다는 점이다. 망치로 때려도 조금도 망가뜨릴 수 없다.

이 로봇지렁이의 작동원리는 형상기억 합금에 전류를 흘려 움직이게 하는데 있다. 연구진은 먼저 로봇지렁이의 외부를 둘러싼 그물눈 관(mesh tube)에 작은 전류를 흘려 주면 뜨거워져 이 선들이 다시 수축될 수 있을 만큼만 늘어난 후 다시 원래 형태로 되돌아가는 원리를 활용했다.연구진들은 이 로봇지렁이 외부를 둘러싼 그물망 선을 가열되거나 냉각되도록 하는 제어 알고리듬을 개발했다. 이를 통해 궁극적으로 지렁이로봇의 동작을 제어할 수 있었다. 또 지렁이 로봇을 길게 가로지르는 선의 온도를 변화시켜 이 로봇을 왼쪽이나 오른쪽으로 움직일 수 있었다.
이 지렁이는 실제 지렁이에 비해 훨씬 단순하다. 하지만 이 로봇지렁이에 적용되는 기술은 향후 가전분야에서도 광법위한 활용을 할 수 있을 것으로 전망됐다.
MIT에 따르면 켈러 오텀 루이스앤 클락대교수는 “향후 10년 안에 우리는 휴대폰이나 휴대용 컴퓨터 ,자동차 등 많은 전자 관련 제품에서 형태를 변화시키는 근육을 보게 될 것”이라고 전망했다.
국제전기전자엔지니어협회 잡지인 IEEE/ASME트랜잭션온 메카트로닉스저널 등에 이 지렁이 로봇이 소개됐다.
MIT가 공개한 아래 동영상은 이 지렁이 로봇의 생생한 작동모습을 보여준다.
관련기사
- 마치 살아있는 듯…촉수 내미는 문어로봇2012.08.13
- 하반신 마비환자, 로봇 다리로 걷다2012.08.13
- '1인 1로봇 시대'···실험은 시작됐다2012.08.13
- 日, 5년내 달에 휴머노이드로봇 보낸다2012.08.13