






"로봇 안전은 사후가 아니라 설계 단계에서 확보해야 합니다. 그 설계는 인공지능(AI)과 시뮬레이션이 지원해야 합니다."
신헌섭 세이프틱스 대표는 23일 서울 명동에서 열린 '산업용 로봇 글로벌 동향과 국제표준전략 세미나'에서 로봇 산업의 다음 과제로 '안전의 자동화'를 제시했다.
신 대표는 "내년부터 로봇에 직접 탑재할 수 있는 힘·압력 제한(PFL) 스피드 컨트롤러와 AI 안전 설계 플랫폼을 상용화할 계획"이라고 밝혔다.

신 대표는 "로봇은 잘 만드는 것보다 잘 쓰는 게 더 어렵다"며 안전 검증 패러다임 전환을 제안했다. 지금까지 로봇은 설치 이후에 충돌 실험이나 안전 인증을 수행하는 것이 일반적이었다.
하지만 그는 "설치 후 안전이 실패하면 레이아웃 전체를 뒤엎는 비용과 시간이 발생한다"며 "설계 단계에서 리스크 평가와 충돌 검증을 동시에 수행해야 한다"고 강조했다.
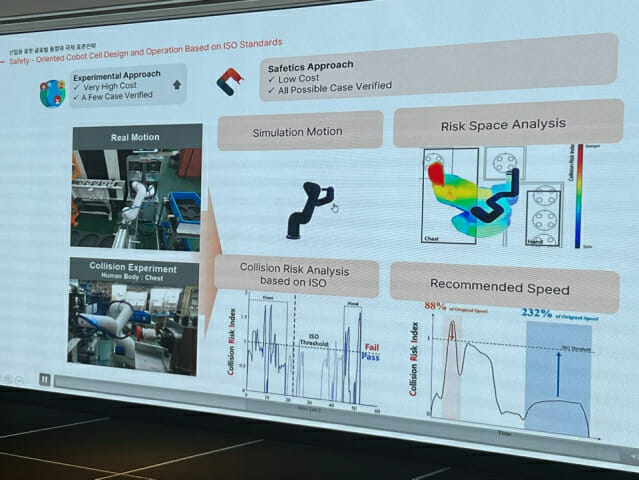
세이프틱스는 이를 위해 '세이프티디자이너'라는 시뮬레이션 기반 안전 설계 플랫폼을 개발했다. 로봇의 궤적, 속도, 엔드이펙터 형상과 질량 데이터를 불러와 가상 공간에서 충돌력을 계산하고, 위험 구간을 자동 식별한다.
신 대표는 "로봇이 어느 지점에서 속도를 줄여야 안전한지를 시각화할 수 있다"며 "AI가 추천하는 최적 속도값으로 생산성과 안전성을 동시에 확보할 수 있다"고 설명했다.
현재 대부분 협동로봇은 힘과 압력을 일정 수준으로 제한하는 PFL 기능을 내장하고 있다. 하지만 신 대표는 "로봇에 내장된 힘 제한 기능은 보조일 뿐, 안전을 보장하지는 않는다"고 지적했다.
이에 세이프틱스는 실제 로봇과 연결돼 실시간으로 속도를 조절하는 세이프티 컨트롤러를 별도 개발 중이다.
그는 "컨트롤러는 로봇 속도를 스스로 조절해 충돌 시 허용치 이내의 힘만 발생하게 한다"며 "AI가 컨설턴트처럼 안전과 생산성을 동시에 관리하는 셀을 구성하는 것이 목표"라고 설명했다.
세이프틱스는 AI 기반 설계 플랫폼과 PFL 컨트롤러를 통합해, 협동로봇·휴머노이드·모바일로봇까지 포괄하는 AI 기반 '안전 셀'자동화 솔루션으로 확장할 계획이다.
관련기사
- 뉴로메카, 협동로봇 충돌위험 실시간 감지 기술 개발2025.06.23
- '협동로봇 안전기술' 세이프틱스, 20억원 시리즈A 투자 유치2024.08.06
- "협동로봇 충돌 안전 계산하고 써야죠"2024.03.09
- "협동로봇 펜스 없이도 안전·생산성 지켜야죠"2023.11.22
신 대표는 "안전은 생산성과 충돌하는 개념이 아니다. 스마트한 기술을 적용하면 두 가지를 함께 높일 수 있다"고 말했다. 안전 기준을 충족하면서도 로봇의 실제 작업 속도를 최적화하는 것이 핵심이라고 설명했다.
이어 "AI와 시뮬레이션이 결합된 안전 설계가 로봇산업의 새로운 경쟁력"이라며 "설계 단계에서부터 안전을 확보할 수 있는 기술이 곧 표준이 될 것"이라고 말했다.





