"국내 조선업 경쟁력 확보를 위해 반드시 세계 최초 자율이동형 족형 용접로봇을 개발하고 도입하겠습니다. 용접로봇의 시대가 머지 않았습니다."
송종찬 제이씨티 대표는 최근 부산 벡스코에서 열린 부산국제기계대전에서 기자와 만나 족형 용접로봇 개발 포부를 밝혔다.
조선업계는 최근 호황으로 조선소 가동률이 높아졌지만 인력난에 시달리고 있다. 이에 숙련공이 필요한 용접 업무에 로봇 자동화 기술을 적용하려는 시도가 한창이다.

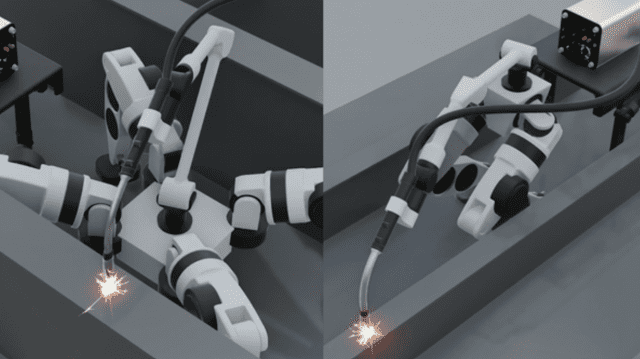
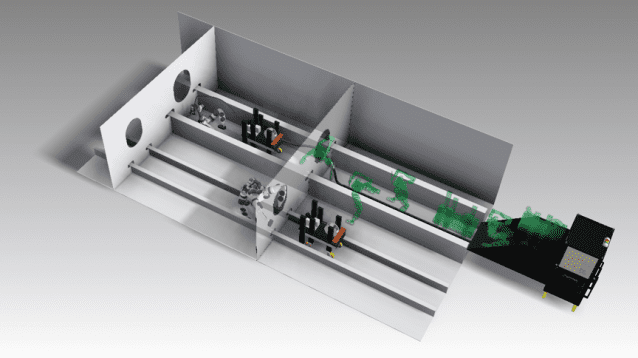
제이씨티는 조선소 선박 블록 내부에서 걸어 다니며 용접 업무를 수행하는 로봇을 개발한다. 최근 가벼운 협동로봇을 옮기면서 용접에 투입한 사례는 있었지만, 걸어 다니는 로봇을 쓰려는 시도는 처음이다.
제이씨티는 산업통상자원부 조선해양산업기술개발사업 일환으로 '블럭 내부에서 자율이동이 가능한 가반하중 30kg 이상 자율 이동체 및 용접로봇시스템 개발' 과제를 본격 착수했다. 지난달 29일에는 1차년도 킥오프 회의를 개최했다.
송 대표는 "제이씨티는 세계 최초로 선박블록의 포터블 협동로봇 용접기를 상용화했다"며 "이 장비는 현재도 여러 조선소에서 사용하고 있고 일본에도 수출하는 등 조선소 인력난 해소에 기여했다"고 말했다.
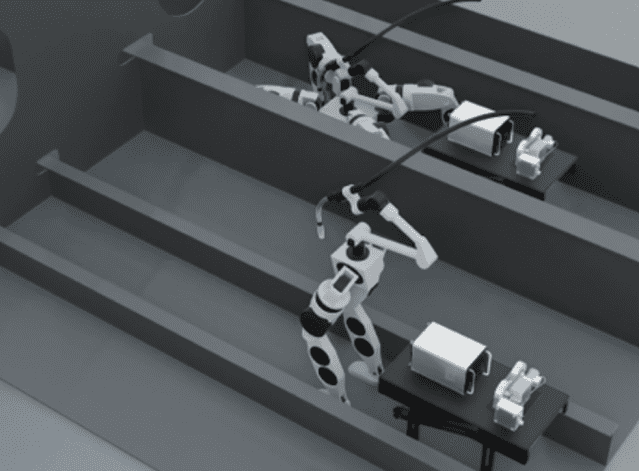
다만 협동로봇 용접기가 모든 걸 해결해줄 수는 없었다. 복잡한 블록 환경에서 모든 용접 업무를 처리하기에는 한계가 있었고, 무엇보다 사람이 직접 옮기면서 써야 하기 때문에 현장 작업자를 완전히 대체할 수는 없었다.
송 대표는 "기존 용접로봇이 완전체로서 역할을 하지는 못하고 있다"며 "이번 족형 용접로봇은 기존 협동로봇의 한계를 타개할 새로운 솔루션이 될 것"이라고 강조했다.
영화 '아바타'에서 기지를 건설하기 위해 용접 로봇을 활용한 것처럼 현실 세계에서도 현장에 사람 대신 로봇을 투입하는 미래가 머지 않았다는 분석이다.
제이씨티는 올해 요구사항 분석과 기초 설계를 만든 뒤 내년 요소기술 개발과 시제품 제작에 돌입한다. 2027년 성능평가를 거쳐, 2028년 통합시운전과 최종 목업 검증을 마칠 계획이다.
사업에는 HD한국조선해양과 삼성중공업, HD현대미포조선이 공동연구 및 수요기관으로 참여한다. 이 밖에도 디든로보틱스, 한국기계연구원, 경북대학교, 미국 캘리포니아대학교 로스앤젤레스(UCLA) 등이 함께 연구한다.
관련기사
- 제이씨티, 조선소 족형 용접로봇 개발 나서2025.05.31
- 제이씨티, 부산기계전서 협동로봇 물류·용접 기술 선봬2025.05.26
- SK하이닉스, 또 쌓는다...온디바이스 AI용 '3D 적층 D램' 개발 시동2026.07.24
- 밥·빵·라면·음료 다 오른다…식품업계 줄인상 현실로2026.07.24
조선소에서 성능을 검증한 뒤에는 건설과 플랜트 등 다방면 산업 현장으로 적용 범위를 넓힌다. 국제 공동개발을 통해 관련 요소기술을 통합하고 상품화까지 이뤄내겠다는 포부다.
송 대표는 "UCLA 로멜라와 협력해 보행, 휴머노이드 등 첨단 분야 로봇 기술에 있어서도 세계적으로 인증받는 수준의 기술력을 함께 만들어 나갈 것"이라며 "주관기업으로서 유기적 협업과 실증 등에 최선을 다하겠다"고 밝혔다.