



원익로보틱스가 한국전자통신연구원(ETRI)과 진행한 로봇 핸드 그리퍼 촉각센서에 대한 연구개발 성과를 발표한다. 27~29일 삼성동 코엑스에서 열리는 '2024 스마트공장·자동화산업전(SFAW 2024)'에서 선보일 예정이다.
원익로보틱스는 지난 7일 한국전자통신연구원과 원익로보틱스의 로봇 핸드 그리퍼인 '알레그로 핸드' 제품을 기반으로 360도 전방위로 3D 압력을 정밀하게 측정할 수 있는 촉각센서 개발 협정식(LOI)을 체결했다.
원익로보틱스의 알레그로 핸드는 4개 손가락이 16개 모터로 구동되며 16가지 방향 자유도를 갖는 로봇 손이다. 독립적으로 또는 로봇에 부착해서 물체를 빠르고 정밀하고 안전하게 파지하고 조작하는데 사용되며, 글로벌 빅테크 유수의 기업에서 연구 목적으로 사용되고 있다.
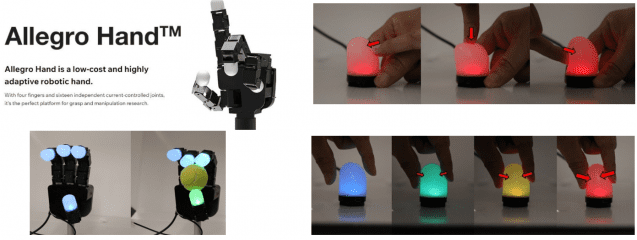
특히 한국전자통신연구원 촉각센서는 공기압을 기반으로 인가되는 방향과 상관없이 360도 전방위의 압력을 매우 정밀하게 감지할 수 있다. 물체의 강성에 맞춰 잡는 힘을 조절 가능하다.
이번 전시회에서 선보이는 기술은 사람 손가락과 유사한 강성(모듈러스)과 형상을 갖는 로봇 손가락으로 개발됐다. 단단한 물체부터 변형되는 소프트한 물체까지 모두 유연하게 다룰 수 있다. 기존 3D 형상 로봇 손가락에 적용되는 압력센서가 물체를 잡는 방향에 따라 왜곡된 신호를 보였던 기술적 한계를 극복했다는 평가를 받는다.
양 기관은 앞으로도 제조, 서비스 분야 등에서 복잡하고 섬세한 작업을 수행할 수 있는 로봇핸드 개발을 위해 긴밀하게 협력한다는 방침이다.
관련기사
- 원익로보틱스, '가반하중 20kg' 이동형 협동로봇 선봬2023.10.20
- 원익로보틱스, 자율주행로봇 엘리베이터 탑승 안전성 평가 통과2023.09.20
- 뉴로메카-원익로보틱스, 로봇 자동화 개발 맞손2023.06.20
- "트럼프 인수위, 전기차 보조금 폐지"…이차전지주 급락2024.11.15
김혜진 ETRI 책임연구원은 "촉각센서 기술이 로봇과 인간 사이의 상호 작용을 한 단계 발전시켰다"이라며 "로봇이 인간의 삶에 더욱 유익하고 통합된 방식으로 기여할 수 있게 할 것"이라고 말했다.
김학래 원익로보틱스 대표는 "연구기관을 넘어 제조 서비스 분야 등 전 산업군으로 시장 확대를 적극 추진해 나갈 계획"이라며 "앞으로도 촉각센서를 결합시킨 섬세한 작업 수행이 가능한 로봇 핸드 그리퍼를 통해 로봇 시장에 압도적인 기술력을 증명하겠다"고 강조했다.





