일본 오사카대 연구진이 지네처럼 걷는 다족 로봇을 선보였다.
30일 인디안익스프레스에 따르면 일본 오사카 대학 연구팀은 신규 로봇 시스템 '미리아폿(myriapod)'을 개발했다. 로봇은 지네처럼 기어다닐 수 있는 다족 로봇이다. 몸체를 직접 조종하지 않고 유연성을 제어하는 방식으로 움직임을 통제할 수 있는 것이 특징이다.
연구팀은 다족 로봇 이동 시스템에서 몸체를 직접 조종하는 경우, 일부 다리 기능에 문제가 생기면 시스템 능력에 심각한 영향을 준다는 점을 발견했다. 또한 많은 다리와 관절이 있는 로봇은 그만큼 고도화된 컴퓨팅 성능이 필요하다고 연구팀 측은 설명했다.
연구팀은 로봇을 움직이기 위해 '자연적 불안전성(natural instability)'을 활용하는 방식을 고안했다. 미리아폿은 6개 몸체 부위로 구성했다. 각 부위는 유연한 관절로 연결됐으며, 부위별로 다리를 2개씩 지녔다.
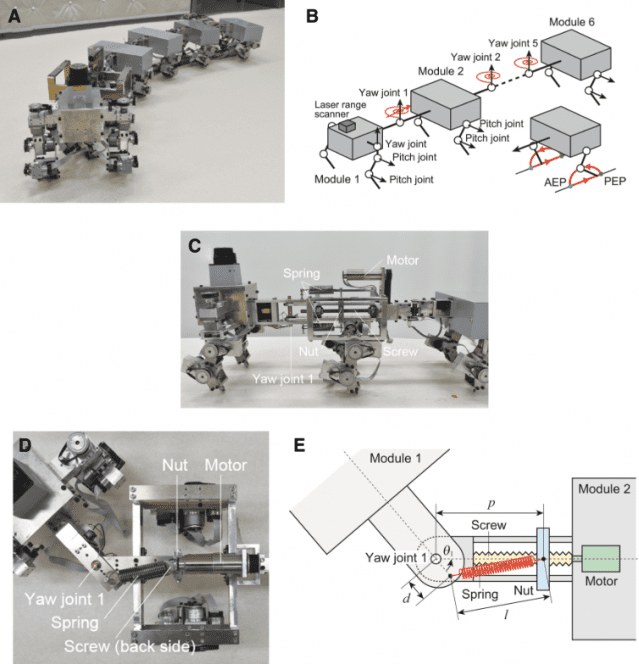
사용자는 로봇 유연성을 조종해 로봇을 움직일 수 있다. 연구팀에 따르면 로봇 유연성이 높아지면 직진 보행이 불안정해지는 '피치포크 분기(pitchfork bifurcation)' 상황이 발생한다. 이 상황에서 로봇이 한 방향으로 구부러진 패턴으로 이동하는 점을 연구팀은 역으로 활용했다.
관련기사
- 가방처럼 메는 '로봇 팔' 등장…日연구진 "상호작용 도움"2023.05.21
- [영상] 테슬라 로봇 ‘옵티머스’, 걸으며 물건도 든다2023.05.17
- "어디 뒀더라"…위치 잊은 물건 찾아주는 로봇 공개2023.05.17
- [영상] NASA가 개발한 뱀 로봇 "무섭게 생겼네"2023.05.10
연구원들은 이 방식을 이용하면 기존보다 적은 에너지로도 로봇 동작을 계산하고 움직일 수 있을 것으로 전망한다. 향후 기술이 고도화되면 수색과 구조 작업이나 우주 탐사에 활용할 예정이다. 이번 연구는 로봇 전문저널 '소프트 로보틱스'에 지난 24일 게재됐다.
아오이 신야 연구논문 주 저자는 "민첩한 곤충이 스스로 움직임에서 역동적인 불안정성을 제어해 빠른 움직임 변화를 유도하는 능력에서 영감을 받았다"라고 전했다.