국내 연구진이 알고리즘으로 고가 라이더 센서 기능을 대체하는데 성공했다.
DGIST는 전기전자컴퓨터공학과 박경준 교수 연구팀이 저렴한 센서만으로도 유리벽 같은 투명한 장애물을 감지할 수 있는 자율주행 SW를 개발했다고 26일 밝혔다.
별도 장비 추가 없이 기존 로봇에 바로 적용 가능하다. 기존 고가 장비 못지않은 인식 성능도 확보했다.
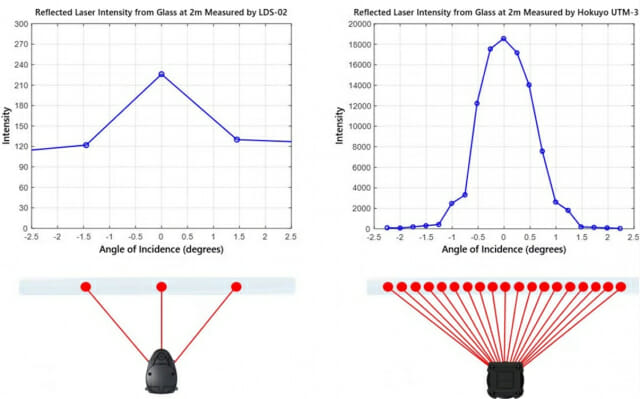
연구팀은 기존 센서는 그대로 두고 소프트웨어만 바꿔 문제를 해결하는 알고리즘 ‘핀맵(PINMAP)'을 개발했다. '핀팹'은 저가 라이다가 간헐적으로만 감지하는 희소한 포인트 데이터를 삭제하지 않고 누적하는 방법으로 유리벽 존재 가능성을 확률적으로 계산한다.
이 알고리즘은 ROS 2 생태계에서 널리 쓰이는 오픈소스 도구(Cartographer=지도 작성, Nav2=경로 설정)를 기반으로 개발됐다., 기존 시스템 구조를 그대로 유지한 채 손쉽게 적용할 수 있는 강점도 갖췄다.
DGIST 건물 내에서 진행한 실험에서 '핀맵'은 유리벽을 96.77% 정확도로 탐지했다. 동일한 저가 라이다를 사용한 기존 방식으로는 탐지율이 0%였다.
박경준 교수는 “하드웨어 성능이 곧 시스템 성능이라는 기존 인식을 뒤집었다"며 “고성능 장비에 의존하지 않고도, 안정적인 자율주행이 가능하다는 것을 입증한 연구”라고 밝혔다.
박 교수는 "비용을 10분의 1 이하로 줄일 수 있어 경제성 면에서도 큰 장점이 있다"며 "병원, 공항, 쇼핑몰, 물류창고 등 유리나 투명 아크릴 벽이 많은 실내 공간에서 자율주행 로봇의 충돌 사고를 줄이고, 서비스 로봇의 대규모 보급에 기여할 수 있을 것"으로 기대했다.
박 교수는 현재 로봇 소프트웨어 스타트업 에스이노베이션스㈜ CTO를 맡고 있다.
관련기사
- DGIST, 신임 이사장에 정진택 고려대 전 총장 선임2025.03.25
- 삼성전기, 자율주행 핵심장치 '라이다용 MLCC' 세계 최초 개발2025.02.05
- "AI가 만든 코드, 기술 발전 가속"…구글 딥마인드, 진화형 알고리즘 '알파이볼브' 개발2025.05.16
- 전기 대신 ‘빛’으로 작동하는 AI 칩 세계 첫 구현...전력 30%↓, 정보량 9배↑2025.04.25
연구는 한국연구재단 중견연구자지원사업 지원을 받았다. DGIST 전기전자컴퓨터공학과 채지영 석박사통합과정생이 제1저자로 참여했다.
연구결과는 국제 학술지(IEEE Transactions on Instrumentation and Measurement)에 게재됐다.