협동로봇 업체 뉴로메카는 산업통상자원부가 주관하는 '2025년도 메가시티협력 첨단산업 육성지원(R&D)' 사업에 최종 선정됐다고 7일 밝혔다.
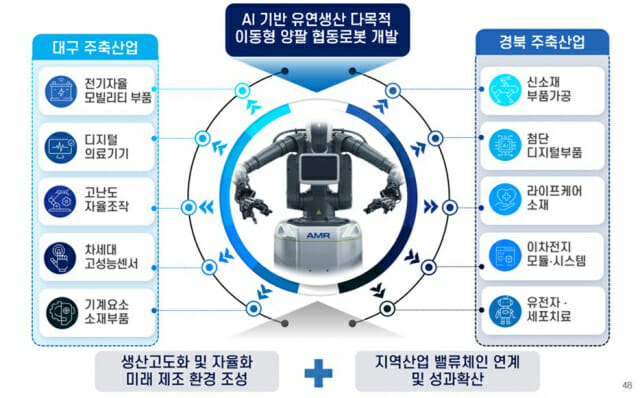
뉴로메카는 이번 사업에서 인공지능(AI) 기반 유연생산용 다목적 이동형 양팔 협동로봇 시스템을 개발한다. 이를 통해 첨단로봇 핵심부품의 고도화와 생산 공정 자율화를 추진하는 것을 목표로 한다.
사업은 지난 달부터 2027년 3월까지 2년간 총사업비 89억원 규모로 추진된다. 초격차 첨단산업과 연계된 메가시티 협력산업의 가치사슬 강화를 통해 지역경제의 성장을 견인하고, 초광역권 협력을 기반으로 기술 중심의 균형 발전을 실현하려는 취지다.
대구광역시는 이번 사업을 경상북도와 협력해 대경권의 AI·로봇 산업 인프라를 연계하고, 첨단 로봇산업 확대 및 AI 기반 자율제조 시스템 구축을 위한 연구개발을 본격적으로 추진할 계획이다.
뉴로메카는 올해 정부가 추진 중인 'K-휴머노이드' 연합 기업으로 참여한 데 이어, 이번 사업의 1세부 과제 주관기관으로 선정되며 AI기반 유연생산용 다목적 양팔 협동로봇 시스템 개발에 본격 착수하게 됐다.
특히 협동로봇 인디 시리즈에 작업자의 제스처를 인식해 동작을 학습하고, AI 기반 실시간 충돌회피 및 작업 인지 기능을 탑재한 2세대 협동로봇 기술을 구현한 바 있다.
여기에 자율이동로봇 모비, 비전 솔루션 인디아이 등 고유 로봇 플랫폼 역량을 결합해 이번 사업을 통해 양팔 조작성, 이동성, 지능성을 통합한 산업형 휴머노이드 개발을 본격화할 예정이다.
뉴로메카는 이를 통해 협동로봇 전문 기업을 넘어 차세대 산업형 휴머노이드 기술을 선도하는 글로벌 로봇 기업으로 도약한다는 전략이다.
1차년도에는 ▲AI 기반 양팔 협동로봇 플랫폼 개발 ▲다기능 엔드툴 및 툴 체인지 스테이지 ▲충돌방지 세이프티 모션 컨트롤 ▲공정 인식 및 작업 계획을 위한 AI 기반 가상데이터 생성 기술 ▲양팔 자세 연동 제어 알고리즘 등 핵심 기술을 집중 개발한다. 2차년도에는 이를 수요기업 공정에 실증 적용할 예정이다.
특히 디지털 트윈 환경에서 실시간 공정 데이터를 학습하는 심투리얼(Sim-to-Real) 강화학습 프레임워크, 양팔 협동로봇과 자율이동로봇(AMR)의 통합 전원 및 제어 시스템, 범용 로봇 티칭 GUI, AI 기반 작업물 트래킹 기술 등은 차세대 지능형 산업 로봇 플랫폼의 기반 기술로 주목된다.
실증 공정은 PCB 기판 라우터 가공, 자동차 전장 및 외장 부품 조립, 물류 이송, 빈 피킹, 적재 등 실제 산업 현장의 다양한 공정이 포함된다. 이를 통해 이동성과 양팔 조작 능력을 융합한 '로봇 워커' 형태 산업형 로봇이 국내 최초로 구현될 예정이다.
또한 뉴로메카는 유럽 연구 기관들과 함께 상체 기반 양팔 협동 플랫폼, 시각 인지, 자율이동, 협업 제어 기술을 공동 개발하고 있다. 이번 메가시티협력 사업을 통해 확보될 실증 기술은 이러한 기술과 연계돼 작업형 휴머노이드 플랫폼으로 전환될 예정이다.
향후 인간형 외형과 센서 시스템을 탑재함으로써 실제 산업 현장에서 작업 가능한 국산 휴머노이드 개발도 가속화할 계획이다.
관련기사
- 뉴로메카, AI 기반 2세대 협동로봇 공개2025.04.24
- 뉴로메카, DN솔루션즈와 협업…고정밀 자동화 솔루션 선봬2025.04.04
- 뉴로메카, 아이지와 연구용 로봇 상용화 박차2025.03.21
- 뉴로메카, 건솔루션과 국방로봇 고도화 나서2025.03.18
뉴로메카는 수요기업의 실제 공정에 대응하기 위해 공정별 요구사항 분석을 기반으로 다양한 크기와 형태에 적응 가능한 그리퍼를 설계하고, 파지 견고성·형상 정밀도 등 신뢰성 평가를 통해 고도화할 계획이다. ISO 9283 기반의 양팔 협동로봇 성능 검증도 병행되며, 이를 통해 수요 맞춤형 시스템 공급과 산업 적용 확대를 추진한다.
뉴로메카 관계자는 "이번 사업은 단순한 기술 개발을 넘어, 로봇이 실제 산업 현장에서 사람처럼 판단하고 이동하며 작업하는 새로운 시대의 전환점"이라며 "국내외 수요기업을 위한 맞춤형 시스템 공급은 물론, 산업형 휴머노이드 프로토타입 공개도 검토하고 있다"고 말했다.