애플(Apple)의 연구진이 발표한 논문 'ELEGNT: Expressive and Functional Movement Design for Non-anthropomorphic Robot'에 따르면, 비인간형 로봇의 표현적 움직임이 사용자 경험과 상호작용 품질을 크게 향상시키는 것으로 나타났다. (☞ 논문 바로가기)
표현적 움직임으로 사용자 평가 2배 향상
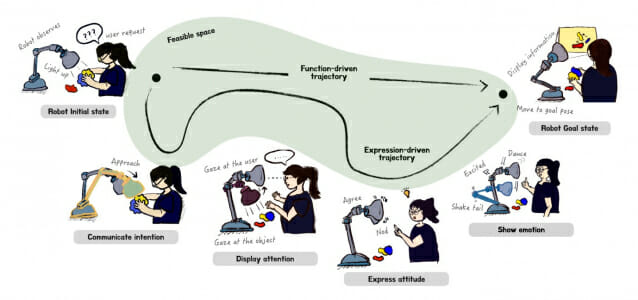
연구진은 6자유도 로봇 팔과 LED 조명, 레이저 프로젝터, 내부 카메라, 하향식 외부 카메라, 음성 시스템이 장착된 램프 형태의 로봇을 개발했다. 이 로봇은 일상적인 가정용 형태를 취하면서도 조명과 움직임을 통해 환경 및 사용자와 상호작용할 수 있도록 설계되었다.
26세에서 51세까지의 참가자 21명을 대상으로 한 실험에서, 표현적 움직임을 포함한 로봇이 기능적 움직임만 있는 로봇보다 평균 2배 높은 평가를 받았다. 구체적으로 표현적 움직임을 포함한 로봇은 평균 56.16점을, 기능적 움직임만 있는 로봇은 평균 28.77점을 기록했다.
꼬리 흔들기부터 고개 끄덕임까지: 로봇의 감정 표현 동작 설계
연구팀은 키네시스와 프록세믹스 움직임을 기본 요소로 활용했다. 공간적 특성과 관련해 로봇은 고개를 끄덕이거나 흔들어 태도를 표현하고, '꼬리 흔들기'나 '앉기' 동작으로 흥분이나 휴식을 나타냈다. 시간적 특성으로는 속도, 일시 정지, 가속도를 조절해 주저함이나 자신감을 표현했다. 또한 공간적 거리 관리를 통해 환경 및 사용자와의 관계를 표현했다.
MDP 기반 로봇 제어: 기능적·표현적 효용 결합한 상호작용 시스템
연구팀은 로봇의 움직임을 마르코프 결정 과정(Markov Decision Process, MDP)으로 수학적 모델링했다. 이 모델은 로봇의 관절 각도, 도구 상태, 환경 상태를 포함하며, 기능적 효용(F)과 표현적 효용(E)으로 구성된다. 기능적 효용은 목표 상태 도달을, 표현적 효용은 의도, 주의력, 태도, 감정 전달을 위한 움직임을 생성한다.
로봇은 다양한 상호작용 채널을 활용한다. 사용자의 제스처를 인식하고, 음성 명령에 반응하며, 관절의 토크 감지를 통해 촉각 입력도 처리할 수 있다. 프로젝터를 통해 벽이나 책상에 정보를 투사할 수 있으며, 조명으로 특정 공간이나 물체를 강조할 수 있다. 예를 들어, 식물 근처에 물 아이콘을 투사하여 물주기를 상기시키거나, 책 읽기 활동 중에 보조 정보를 표시할 수 있다.
음악·대화·알림 등 사회적 작업에서 두각: 6가지 시나리오 실험 결과
실험은 6가지 시나리오로 구성되었다. 기능 중심 작업에는 사진 촬영용 조명 제공, 프로젝트 지원, 오류 표시가, 사회적 작업에는 음악 재생과 춤추기, 일상 대화하기, 물 마시기 알림이 포함되었다. 특히 사회적 작업에서 표현적 움직임의 효과가 더욱 두드러졌으며, 모든 평가 지표에서 통계적으로 유의미한 차이를 보였다.
공감능력 낮은 사용자가 더 선호: 연령·전문성에 따른 로봇 수용도 차이
흥미로운 점은 참가자 배경에 따른 차이다. 나이가 많은 참가자일수록 표현적 로봇에 대한 선호도가 낮았고(p < 0.001), 로봇공학 배경이 없는 참가자들이 로봇공학자들보다 더 높은 평가를 했다(p = 0.006). 또한 공감 능력이 낮다고 자체 평가한 참가자들이 표현적 움직임에 더 긍정적으로 반응했다.
'강아지 같다' vs '너무 기계적이다': 표현적 움직임의 사용자 인식 영향
질적 분석에서는 표현적 움직임을 가진 로봇이 '강아지'나 '아이' 같은 생명체로 인식되는 반면, 기능적 움직임만 있는 로봇은 '지루하다', '너무 기계 같다', '감정이 없다'는 평가를 받았다. 특히 사회적 대화 중에 움직임이 적은 로봇은 '섬뜩하게 응시하는 것 같다'는 부정적인 반응을 이끌어냈다.
자연스러운 음성-동작 조화의 필요성: 기계적 음성이 친근감 저해
연구는 로봇의 음성과 움직임 간의 조화도 중요함을 밝혀냈다. 참가자들은 표현적인 움직임이 '매력적이고 성격을 보여주는' 반면, 로봇의 음성이 '자동화된', '딱딱한' 느낌을 주어 '상호작용의 친근함을 떨어뜨린다'고 지적했다. 이는 향후 로봇 개발에서 다중 모달리티 간의 조화가 중요함을 시사한다.
이번 연구는 비인간형 로봇의 감정 표현이 인간-로봇 상호작용을 개선하는 데 중요한 역할을 할 수 있음을 보여주었다. 연구진은 이러한 발견이 향후 일상생활에서 활용될 로봇 설계에 중요한 통찰력을 제공할 것으로 기대하고 있다.
'무의미한 움직임'과 '장기적 효과' 과제: 맥락 인식형 로봇 개발 제안
연구진은 표현적 움직임의 효과가 시간이 지남에 따라 감소할 수 있다는 점을 지적했다. 참가자들은 처음에는 새로움 요소로 인해 긍정적으로 반응할 수 있지만, 이는 빠르게 사라질 수 있다고 언급했다. 또한 일부 참가자들은 로봇이 상시 움직이는 것을 불편해했으며, 특히 명백한 이유 없는 움직임은 로봇의 주의력 부족으로 해석될 수 있다고 지적했다.
관련기사
- 구글 AI 제미나이, 슈퍼볼 광고 망신…세계 치즈 소비량 잘못 계산2025.02.10
- '보안 논란' 딥시크, 안전하게 사용하는 3가지 방법2025.02.11
- [Q&AI] AI가 추천하는 성수동 데이트 코스…발렌타인데이에 뭐 할래?2025.02.11
- AI발 메모리 대란, 자동차 업계도 덮쳤다2026.07.25
연구팀은 이러한 발견을 바탕으로 맥락 인식이 가능한 로봇 움직임 생성을 위한 프레임워크 개발의 필요성을 제시했다. 또한 개인의 선호도와 작업 특성에 따라 표현적 움직임을 조절할 수 있는 적응형 시스템 개발을 향후 연구 과제로 제안했다.
■ 이 기사는 AI 전문 매체 ‘AI 매터스’와 제휴를 통해 제공됩니다. 기사는 클로드 3.5 소네트와 챗GPT를 활용해 작성되었습니다. (☞ 기사 원문 바로가기)