






휴머노이드(인간형) 로봇이 물건을 집어 나르고 요리나 설거지를 하는 수 많은 장면이 매스컴에 등장하고 있다. 그러나 이 정도로 사람처럼 일한다고 보는 것은 아직 ‘착각’이라는 주장이 제기됐다.
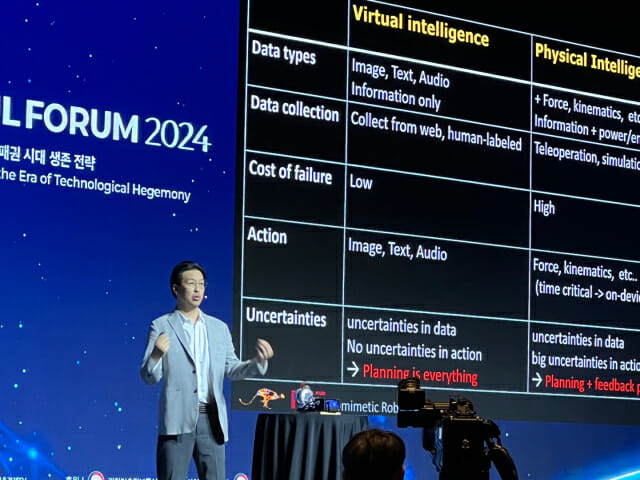
김상배 매사추세츠공대(MIT) 기계공학과 교수는 28일 서울 중구 신라호텔에서 열린 ‘서울포럼 2024’ 기조강연에서 “지금까지 로봇에 생성형 인공지능(AI)을 접목한 사례는 모방에 가깝다”며 “새로운 창조 활동을 했다고는 보기 어렵다”고 말했다.
김 교수는 세계에서 가장 빠른 4족 보행로봇 ‘치타’를 개발한 로봇공학 권위자다. MIT 생체모방로봇연구소를 이끌며 세상과 상호 작용할 수 있는 로봇을 만들기 위한 연구를 이어왔다.

김 교수는 이날 강연에서 특히 물리적 데이터의 중요성에 대해 재차 강조했다. 단지 문자와 그림을 연계해 인간의 흉내를 내는 것에 그쳐서는 안 되고, 실제 물리 세계에서 로봇이 이해할 수 있는 언어를 통해야만 진정한 창조가 가능하다고 설명했다.
글로벌 빅테크 기업들이 생성형 AI 개발 경쟁을 벌이고 있다. 여기에 쓰는 언어 데이터는 수집하거나 다루기 쉬운 형태로 정돈된 경우가 많았다. 그보다 다양성이 넓은 그림 데이터는 일일이 언어와 대치하는 라벨링 작업을 거쳐야 학습이 가능했다.
이런 학습 과정이 실제 물리적 세상에 나왔을 때 곧바로 대응할 수 있는지는 전혀 다른 문제다. 김 교수는 몇 가지 문제점을 짚었다. 먼저 충분한 데이터를 확보하기 어렵다는 것이다. 대개 실제 실험이나 시뮬레이션을 거쳐야 하는데 아직까지 한계가 많다는 지적이다. 또 실제 세계에서는 변수가 발생했을 때 상당한 비용을 지불해야 하는 점도 난제다.
김 교수는 “우리 몸을 동작하고 만지고 짚는 이런 지능들은 대부분 무의식적”이라며 “물리적 세상에서는 아무리 알고리즘을 잘 짜도 항상 불확실성이 있다. 단지 사람의 데이터를 모방하는 것만으로는 안 된다”고 말했다.
김 교수는 설거지를 하는 상황을 가정했다. 몇 가지 상황만 생각하더라도 변수가 많다는 것. 그는 “사람은 실수하면 만회한다. 미끄러지면 다시 잡을 때도 있고, 접시를 떨어뜨리면 다시 집는다. 깨질 수도 있다”며 “이 모든 상황에 대한 데이터를 모으는 것을 상상하기 어렵다”고 덧붙였다.
이와 같은 문제를 극복하기 위한 답으로 제시된 것이 ‘로봇 언어’다. 단지 가상 세계에서 모방하는 방식을 넘어 물리적인 현실을 이해할 수 있는 획기적인 대안이 필요하다고 그는 역설했다.
관련기사
- "큰 그림은 완성, 추진력 발휘할 때"...로봇 B학점2024.05.14
- "휴머노이드 시대 5년 안에 온다…韓 우수 기술력 보여줄 것"2024.04.29
- "韓 로봇산업, 1% 기술 확보 중…민간 생태계 강화해야"2024.05.01
- 전동식이냐 유압식이냐...휴머노이드 미래 기술 선택지는?2024.04.18

김 교수는 마지막으로 한국이 전통 제조업을 근간으로 AI 기술을 갖추기에 적합한 환경이라며 기대감을 드러냈다. 중국이 제조업 굴기로 매섭게 산업 역량을 키우고 있고, 미국이 고부가가치의 AI 패권을 쥐는 형세이지만 “한국 입장에서는 다르게 보면 기회”라고 말했다.
그는 “단지 AI 기술이 뒤쳐졌다고 챗GPT에만 경쟁할 게 아니라 이런 기술을 어떻게 활용할 수 있을지 고민해야 한다”며 “제조 인프라를 바탕으로 하드웨어와 소프트웨어를 함께 발전시켜 나가는 방향이 그 무엇보다 중요하다”고 꼬집었다.





